Схема управления двигателем постоянного тока. Как происходит управление двигателем постоянного тока. Управление двигателем постоянного тока. Конструкция и обслуживание двигателя постоянного тока
Электродвигатели постоянного тока широко применяются в промышленности, на транспорте и в других областях. Блоки управления коллекторными двигателями AWD10 и AWD15 – разработка отечественной компании «Лаборатория Электроники» – позволяют управлять скоростью и направлением вращения двигателя с рабочим напряжением до 90 В.
ЗАО «Лаборатория Электроники», г. Москва
Пламенный мотор
Какое изобретение двух-трех последних веков вы бы выделили как судьбоносное, главное, на котором базируется всё наше современное техническое благополучие? Возможно, пальму первенства стоит отдать паровой машине. Многие вещи, о которых люди мечтали на протяжении тысячелетий, почти мгновенно воплотились в жизнь после того, как был совершен принципиальный шаг – изобретено сердце для механизмов, двигатель, мотор. С ним корабли пошли в полный штиль, человек научился летать, паровозы с «пламенным мотором» пожирали огромные расстояния, появилась возможность быстро обработать крупный надел земли…
Другое дело, что двигатели дают неприятные побочные эффекты – повышают температуру, загрязняют воздух ядовитыми газами, шумят. Однако мы остановим внимание на наиболее экологичной, а значит, и актуальной сегодня разновидности – электродвигателях. Точнее, мы рассмотрим блоки управления электродвигателями постоянного тока, которые позволяют управлять их скоростью вращения и крутящим моментом. Именно об этих устройствах и пойдет речь в статье.
Электродвигатели постоянного тока
Все электродвигатели делятся на два вида: переменного и постоянного тока. Двигатели переменного тока широко используются в промышленности – они приводят в действие тяжелые станки, крупные и тяжелые установки. Постоянный ток подходит для более мелких и тонких механизмов (например, электроника умеет работать только на постоянном токе). На электродвигателях постоянного тока, в частности, работают беспроводные устройства: электрические инструменты или машины, питающиеся от аккумуляторов, в том числе современные электромобили. Без двигателей постоянного тока невозможно представить многие виды транспорта: электрички, электровозы, трамваи, троллейбусы, метро. Однако в промышленности они тоже находят применение – например, с их помощью работают металлорежущие станки, сварочное оборудование и многие другие устройства.
Двигатели постоянного тока бывают коллекторными, вентильными и шаговыми в зависимости от того, какое из магнитных полей является постоянным. Вентильные и шаговые относятся к классу бесколлекторных. Вентильные двигатели обычно обладают высокой стоимостью, обусловленной использованием дорогостоящих постоянных магнитов в конструкции ротора. У шаговых двигателей, как правило, низкие энергетические характеристики и низкий крутящий момент на высоких скоростях.
Перечислим достоинства коллекторных двигателей:
Большой вращающий момент, развиваемый при сравнительно небольших габаритных размерах;
Широкий диапазон регулирования скорости вращения;
Большой вращающий момент при пуске;
Высокий КПД, достигающий 90 %.
К недостаткам можно отнести следующее:
Необходимость ухода и наблюдения за коллектором и щетками на протяжении всего времени эксплуатации такого электродвигателя;
Излучение электромагнитных помех, обусловленное искрением между щетками и коллектором;
Сравнительно большая масса и инерционность якоря, что ведет к снижению быстродействия электродвигателя.
Блоки управления коллекторными двигателями AWD10 и AWD15
Блоки управления коллекторными двигателями производства фирмы ЗАО «Лаборатория Электроники» AWD10 и AWD15 обладают одинаковым принципом действия, основанным на широтно-импульсной модуляции (ШИМ), и предназначены для управления скоростью и направлением вращения двигателя с рабочим напряжением до 90 В.

Рис. 1. Блок управления AWD10
Компания ЗАО «Лаборатория Электроники» была основана в 2005 году выпускниками МГТУ им. Н. Э. Баумана. Основное направление ее деятельности – разработка и изготовление управляющей и контрольно-измерительной аппаратуры для промышленности. Блоки управления AWD10 (рис. 1), AWD6 и AWD8 были разработаны в 2006 году как модули управления постоянного тока, используемые в приборах собственного производства. В 2007 году после длительного тестирования в реальных условиях эти устройства были запущены в серию. Блок управления AWD15 (рис. 2) был разработан в конце 2009 года в качестве замены блоков нереверсивного управления AWD6 и AWD8.

Рис. 2. Блок управления AWD15
Множество настроек блока AWD10 позволяют гибко адаптировать его под различные задачи. Реализованный на микроконтроллере пропорционально-интегрально-дифференциальный (ПИД) регулятор с настраиваемыми коэффициентами позволяет стабилизировать скорость вращения двигателя с любыми нагрузками, в том числе переменными. В качестве обратной связи регулятора для блока управления AWD10 может быть выбран сигнал противо‑ЭДС двигателя в момент его работы в генераторном режиме, импульсный сигнал от энкодера или датчика холла либо аналоговый сигнал от 0 до 5 В. На микроконтроллере блока управления AWD15 реализован ПИ-регулятор, а в качестве обратной связи используется только противо‑ЭДС двигателя. Это дает возможность стабилизировать скорость вращения (на уровне 1–5 %) или перемещения объекта без использования дополнительных элементов обратной связи, что позволяет не усложнять конструкцию прибора, который не предъявляет жестких требований к стабилизации скорости.
Для начала рассмотрим повнимательней обычный двигатель постоянного тока . Любой двигатель имеет две основные части - ротор и статор. В коллекторном двигателе статор - неподвижная часть, состоит из постоянных магнитов (или в более мощных двигателях электромагнитов). Ротор (якорь) - вращается, совмещён с валом двигателя и состоит из многих катушек (как минимум трех). Коллектор (щёточно-коллекторный узел) отвечает за переключение выводов катушек ротора. Ток в таком двигателе подводится к катушкам ротора через скользящие контакты (или щётки). В один момент времени подключена только одна катушка, она и создаёт момент вращения двигателя за счет проходящего тока.
С точки зрения базовых элементов схемотехники любой двигатель можно представить в виде следующей эквивалентной схемы:
Когда мотор подключён источнику постоянного тока и еще не начал вращаться, то он представляет из себя обычное сопротивление. То есть через него течет ток согласно закону Ома и сопротивлению его обмотки. Преобладает компонента R. Индуктивность начинает влиять когда напряжение не постоянное, например, если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность, как правило, очень малы. Его можно померить обычным мультиметром. Небольшие модельные моторы имеют сопротивление 1-10 Ом. Поэтому, при старте мотора (когда он ещё не начал вращаться), ток сильно превышает рабочий ток мотора и если мотор долго будет неподвижен (его заклинило), то такой высокий ток может привести к перегреву мотора и выходу из строя.
Индуктивность катушек ротора пытается поддерживать ток протекающий через обмотки постоянным. Ее влияние заметно только когда напряжение меняется. Когда мотор начинает вращаться, то коллектор начинает переключать катушки ротора, что вызывает изменение напряжения. Индуктивность пытается в эти моменты поддерживать ток протекающий через мотор на постоянном уровне за счет напряжения.
Во время вращения катушки ротора начинают вырабатывать ток (как генератор) - возникает обратная ЭДС. Чем быстрее вращается ротор, тем выше обратная ЭДС возникающая в катушках, а так как она направлена против напряжения питания, то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие выводы:
пока мотор не начал вращаться он является сопротивлением
если приложить к мотору изменяющееся напряжение (например PWM), то индуктивность будет иметь большое влияние, она будет сопротивляться изменению тока через мотор
когда мотор вращается, то он является генератором, и за счет этого потребляемый ток снижается (итоговое напряжение равно V - Vbemf).
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока .
Для того чтобы коллекторный мотор постоянного тока начал вращаться, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения - скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. При повышении напряжения ток через мотор будет расти, и он начнётся перегреваться и может сгореть. На следующем графике некоего мотора хорошо видна взаимосвязь его основных показателей.

Максимальной
мощности (Torque - крутящий момент) мотор
достигает при максимальном токе. И
зависимость тока и момента - линейная.
Максимальной скорости двигатель
достигает при отсутствии нагрузки (на
холостых оборотах), при увеличении
нагрузки скорость вращения падает.
Номинальное рабочее напряжение указано
в паспорте на двигатель и именно для
него и приведён и этот график. Если же
снижать напряжение, то скорость вращения,
и все остальные показатели будут тоже
падать. Как правило, ниже 30-50% от
номинального напряжения мотор перестанет
вращаться. Если же мотор не сможет
прокрутить вал (его заклинило), то по
сути станет сопротивлением и потребляемый
ток достигает максимальной величины,
зависящей от внутреннего сопротивления
его обмоток. Обычный мотор не рассчитан
на работу в таком режиме и может сгореть.
Посмотрим как меняется ток от нагрузки на реальном моторе R380-2580.

Мы
видим, что рабочее напряжение данного
мотора - 12В, потребляемый ток под
нагрузкой - 1.5А. Ток останова мотора
вырастает до 8А, а в холостом же вращении,
потребляемый ток равен всего 0.8А.
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ - транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей неправильной схеме.

Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение - мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя . Чтобы этого не произошло, его необходимо защитить.
Как мы уже знаем одна из компонент мотора - индуктивность - сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то сопротивление транзистора резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного напряжения и замкнёт его на обмотке мотора, тем самым защитит транзистор.
Также, все постоянные моторы имеют еще одну неприятность - при вращении механический контакт в коллекторе не идеален, щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная правильная схема (диод может быть не обязательно Шоттки, но он предпочтителен).

Биполярные транзисторы в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижает КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи с минимальными потерями. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно или выбирать специальные логические MOSFET, которые могут управляться низким напряжением - 1.8 .. 2.5В или использовать специальные схемы накачки напряжения (драйверы полевых транзисторов). Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль - остановится. Однако вращаться он будет с постоянной скоростью и только в одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост - меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).

В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы - драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов - обычно это 10-15В. Также драйверы обеспечивают большой импульсный ток необходимый для ускорения открытия полевых транзисторов. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на 2-х N-канальных транзисторах.

N-канальные
полевые транзисторы, стоят дешевле
P-канальных, а также имеют меньшее
сопротивление в открытом состоянии,
что позволяет коммутировать большие
токи. Но ими сложнее управлять в верхнем
положении. Проблема использования
N-канального транзистора в верхнем ключе
состоит в том, что для его открытия нужно
подать напряжение 10В относительно
Истока, а как вы видите на схеме там
может быть все напряжение питания
мотора, а не 0 вольт. Таким образом, на
базу необходимо подать 10В + напряжение
питания мотора. Нужна специальная
bootstrap схема для повышения напряжения.
Обычно, для этих целей используется
схема накачки напряжения на конденсаторе
и диоде. Однако такая схема работает
только, если вы постоянно подзаряжаете
конденсатор - открывая, закрывая нижний
транзистор (в ШИМ управлении). Для
возможности поддерживания верхнего
транзистора постоянно открытым нужно
еще усложнять схему - добавлять схему
внешней подпитки конденсатора. Вот
пример схемы управления N-канальными
транзисторами без использования
микросхем драйверов.

Перейдём к управлению скоростью вращения мотора.
ШИМ сигнал - управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Мы же будет рассматривать простой вариант - управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор имеет индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать импульсный ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток и инерции ротора. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current - снижается при увеличении частоты). Низкая частота:

высокая
частота:

Если же частота упадёт ниже определённого уровня, ток станет разрывным (будет падать до нуля) и в итоге мотор не сможет крутиться.

Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate - полный заряд, который надо передать транзистору, чтобы он открылся полностью.

Индуктивность моторов не такая уж маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8 кГц, лучше около 20кГц (за звуковым диапазоном).
Дополнительно стоит отметить, что для снижения стартового тока необходимо плавно поднимать на старте частоту ШИМ. А еще - лучше контролировать стартовый ток мотора с помощью датчиков тока.
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант - применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счёт, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счёт переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплиментарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам - а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье .
На этом мы закончим нашу статью про моторы. Теперь можно перейти к практике - будем делать для робота.
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.
В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
- СИФУ (Система Импульсно - Фазового Управления)
- Регулятор
- Защита
Принципиальная схема привода приведена ниже.
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно - Фазового Управления) - преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» - DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы. 
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта . Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
Вот осциллограммы. 
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ - S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке - «земля», R13, - С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов - в схеме предусмотрен узел «разгона - торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов
.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона - торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 - компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) - происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 - 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)

Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 - 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя. 
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра

На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка


На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй - многооборотный - для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Публикация в журнале «Компоненты и технологии» двух статей, посвященных шаговым двигателям, особенностям их конструкции и схемам управления, а также промышленным решениям, доступным для выбора таких двигателей, вызвала дискуссию и интерес читателей. В ходе обсуждения было высказано пожелание автору предложить столь же гибкие и простые практические решения в виде схем для управления коллекторными двигателями постоянного тока малой и средней мощности, поскольку в технических изданиях уделяется недостаточное внимание данному вопросу. Именно об этом и рассказывает настоящая статья. В материале рассмотрены практические решения и даны рекомендации в части управления коллекторными двигателями постоянного тока малой и средней мощности.
Как известно, коллекторные двигатели постоянного тока, если смотреть в общем плане, являются наиболее доступными и распространенными в использовании, находящими надлежащее место в самых разнообразных устройствах. Их достоинства несомненны — это цена и простота схем управления. Если с первым утверждением трудно не согласиться, то второе — часто вводит в заблуждение, и не только неопытного пользователя. Действительно, управление скоростью такого двигателя вроде бы и не вызывает особых сложностей — это могут быть как обычные аналоговые регуляторы напряжения, так и более сложные схемы на основе широтно-импульсных (ШИМ) регуляторов. Проблема, а вернее, проблемы скрываются в другом. Дело в том, что необходимо рассматривать вопрос управления коллекторным двигателем постоянного тока в контексте его реального применения с конкретной нагрузкой и в конкретных условиях, а именно — строить схему управления в зависимости от типа решаемой задачи.
Если стоит вопрос регулировки скорости коллекторного двигателя без ее стабилизации, то для этой цели используются как аналоговые, так и импульсные схемы прямого управления без обратной связи. Аналоговые регуляторы применяются для управления маломощными двигателями и выполняются, как правило, на основе схем стабилизации напряжения иногда с возможностью ограничения максимального тока для защиты двигателя и нагрузки. Но наиболее часто используются регуляторы с ШИМ. В отличие от аналоговых схемы управления с ШИМ обладают значительно более высоким КПД. Их цена в общем соизмерима, так как они не требуют дорогих радиаторов. Однако в некоторых применениях им необходима стабилизация напряжения питания, так как постоянная составляющая их выходного напряжения зависит не только от отношения длительности импульса к периоду импульсной последовательности τ/Τ, но и от амплитуды. Можно применить и понижающие импульсные DC/DC-преобразователи, если они обеспечивают соответствующий диапазон регулирования напряжения. Расчет таких преобразователей не особо сложен, для этого понадобится интерактивный программный калькулятор высокого уровня, описанный в . Но при расчете DC/DC-преобразователей следует учитывать, что они должны обеспечить надежную работу не только в нужном диапазоне напряжений, но и токов, что не всегда просто оптимизировать. Именно поэтому рекомендуется не использовать непроверенные «готовые» схемные решения, а обратиться к расчетам и правильному выбору ИМС преобразователя.
Если существует проблема не просто регулирования, а стабилизации скорости, она решается при помощи сложных систем с контуром обратной связи. Одним из элементов такой обратной связи являются датчики, дающие информацию о скорости вращения. Информация снимается или с вала ротора двигателя, или с конечного исполнительного механизма. Стабилизация скорости осуществляется либо путем использования фазовой автоматической подстройки частоты (ФАПЧ) вращения, либо традиционными для автоматики специальными регуляторами. Обычно применяются пропорционально-интегрально-дифференциальные (ПИД) регуляторы, как более универсальные, или пропорционально-интегральные (ПИ), как более простые. В любом случае оба решения достаточно сложны как для расчета, так и для исполнения, поскольку они привязаны не только к конкретному типу двигателя, но и ко всей системе привода в целом. Причем характеристики регулирования в данных системах определяются экспериментально. Ознакомиться с подобными регуляторами можно во втором томе . Все изложенное выше касается построения петли управления. Но в любом случае в качестве конечных каскадов в таких системах предусмотрены либо аналоговые регуляторы, либо регуляторы с ШИМ.
Но есть задачи и другого типа. Например, нам необходимо осуществить управление прецизионной переменной нагрузкой, не допускающей рывков и чувствительной к остановке и пуску двигателя. Другими словами, требуется обеспечить плавный старт, равномерное вращение двигателя под не прогно-зированно меняющейся нагрузкой на его валу и его плавную остановку при неком заданном увеличении момента на валу двигателя. Пример такой задачи — управление приемным узлом магнитного регистратора. Понятно, что рывки при вращении двигателя в этом применении совершенно недопустимы, а старт и остановка двигателя должны быть «мягкими». Особенно остро эта проблема стоит при использовании малоинерционных двигателей, то есть миниатюрных двигателей с малой собственной массой ротора. Простая подача некоторого фиксированного напряжения на такой двигатель приводит к его мгновенному старту и рывку магнитного носителя, а в момент его окончания (если конец носителя жестко зафиксирован) — возникает удар уже из-за накопленной массы и инерционности такой нагрузки на валу двигателя (сказывается собственная масса накопленного носителя в приемном узле). Один из наиболее подходящих вариантов решения подобной проблемы, который использовался автором в серийном изделии, представлен на рис. 1.
Рис. 1. Схема управления для маломощных двигателей, работающих на прецизионную нагрузку с переменным моментом
Естественно, можно подобрать стандартные ИМС регуляторов, но данное решение более гибко и легко адаптируется к конкретному применению. Оно особенно удобно в случаях, когда важна не скорость вращения, а необходимый момент, который должен развиваться двигателем. Причем он точно не определен или меняется в зависимости от обстоятельств, например от внешнего воздействия, изменения нагрузки или напряжения питания. Схема представляет собой регулятор напряжения с внешним управлением запуском и ограничением по току, то есть он имеет падающую выходную характеристику — зависимость выходного напряжения от тока, потребляемого двигателем. Выходное напряжение регулятора при номинальной нагрузке двигателя (задается делителем R6, R8 и для варианта, приведенного на рис. 1) может быть установлено в пределах от 10,8 до 2,3 В. В среднем положении ротора подстроечного резистора R8 выходное напряжение регулятора при изменении питающего напряжения от 9 до 15 В равно (4,4 ±0,1) В. Первичная характеристика управления ограничением по току задается номиналом сопротивления R3 и устанавливается подстроечным резистором R4 (с учетом резистора R5). Максимальный выходной ток может быть с приемлемой точностью рассчитан по формуле:
![]()
где 6,6 — это максимальное напряжение на эмиттере транзистора VT1 регулятора в режиме короткого замыкания в нагрузке.
В приведенной схеме, в отличие от остальных схем регуляторов, напряжение в режиме короткого замыкания мало зависит от установленного выходного напряжения регулятора. В предложенной схеме реальный максимальный выходной ток равен примерно 3,3 А, а минимальный ток ограничения составляет приблизительно 40 мА. Как можно видеть, диапазон регулировки тока достаточно широк, что не под силу многим другим схемам регуляторов, в которых нет внутреннего усилителя, дополняющего токовый сенсор. Ток ограничения в среднем положении ротора подстроечного резистора R4 лежит на уровне 340 мА во всем диапазоне выходных напряжений при изменении питающего регулятор напряжения от 9 до 15 В. Максимальный ток достигается в левом положении движка (рис. 1), минимальный — в правом. Как уже упоминалось, выходное напряжение, а следовательно, и скорость вращения двигателя при минимальной нагрузке ротора устанавливается подстроечным резистором R8 («скорость»), а подстройка необходимого уровня ограничения по току осуществляется подстроечным резистором R4 («огр. тока»).
Учитывая особенности приведенной схемы, ее настройка производится следующим образом: выход схемы управления закорачивается амперметром, и подстроечным резистором R4 устанавливается необходимый ток ограничения; затем подключается двигатель на минимальной нагрузке ротора и резистором R8 устанавливается соответствующее выходное напряжение, обеспечивающее заданную скорость вращения двигателя. Схема с высокой точностью (в описываемом режиме не хуже чем в 2%) удерживает выходное напряжение на заданном уровне до достижения 65% нагрузки (максимального выходного тока, установленного резистором R4). Далее напряжение на двигателе начинает плавно уменьшаться, тем самым ограничивая развиваемый им момент. График изменения тока и напряжения в зависимости от нагрузки двигателя (рабочее напряжение 5 В, сопротивление обмотки 2 Ом) приведен на рис. 2.

Рис. 2. График выходного тока (I out) и выходного напряжения (V out) регулятора (рис. 1) в зависимости от нагрузки при токе ограничения 200 мА
Управление включением/выключением двигателя осуществляется командой CTRL — логической единицей от любой цифровой микросхемы или подачей на этот вывод напряжения уровнем не ниже +1,5 В. При включении схемы (из-за ограничения тока и, следовательно, момента) рывка в управлении внешней нагрузкой не происходит. После разгона двигатель переходит в стационарный режим с током потребления ниже установленного схемой ограничения. При увеличении нагрузки двигателя более установленного уровня выходной ток регулятора остается на уровне, заданном схемой ограничения, а напряжение на двигателе плавно уменьшается (рис. 2) и при закорачивании его ротора вследствие полной остановки становится равным падению напряжения на активном сопротивлении обмотки ротора при заданном максимальном выходном токе. График, показывающий изменение мощности двигателя (условия аналогичные для графика, приведенного на рис. 2) в зависимости от нагрузки, показан на рис. 3.

Рис. 3. График зависимости мощности, развиваемой двигателем от нагрузки, при токе ограничения 200 мА
Как видно из графика (рис. 3), мощность, в случае если нагрузка на двигатель превышает 70%, начинает ограничиваться и плавно уменьшаться. При принудительной остановке двигателя она составит всего 12% от максимально установленной, тем самым защищая двигатель от перегрузки и исключая его резкое торможение. Ток ограничения регулятора рекомендуется выбирать на 20-25% выше номинального рабочего тока в заданном режиме эксплуатации двигателя при минимально допустимом рабочем напряжении двигателя. При проектировании устройств с использованием описанного принципа необходимо обязательно учитывать мощность, рассеиваемую на регулирующем транзисторе VT1 (возможно, потребуется радиатор), а в ряде случаев и мощность, рассеиваемую на резисторе R3. Кроме особенностей схемы, описанных выше, данное решение продлевает срок службы двигателя и упрощает общую конструкцию приемного узла, так как она уже не требует большого количества компенсирующих неравномерность приема магнитного носителя роликов. А в отличие от вариантов с использованием ШИМ данное решение практически не оказывает дополнительного влияния на общий уровень электромагнитных и радиопомех устройства в целом.
Может возникнуть резонный вопрос: зачем такая сложность, когда можно использовать схему на основе интегрального стабилизатора с ограничением тока? В качестве примера рассмотрим «похожий» вариант на базе ИМС регулируемого стабилизатора напряжения с опцией ограничения его выходного тока LM317T . Такая схема представлена на рис. 4.

Рис. 4. Упрощенный вариант аналогового регулятора на базе ИМС LM317T
Расчет такой схемы предельно прост. Для рассматриваемого случая выходное напряжение на холостом ходу определяется по формуле:
![]()
где V ref — напряжение внутреннего опорного источника, согласно спецификации типовое значение V ref = 1,25 В.
Ток ограничения задается резистором R lim и равен:
![]()
Условия оставим без изменений: выходное напряжение 5 В, ток ограничения 200 мА. Результаты расчетов номиналов элементов указаны на схеме рис. 4.
Теперь, чтобы развеять сомнения и снять вопросы по использованию подобных решений, на рис. 5 и 6 приведены графики зависимостей для схемы рис. 4 в аналогичных условиях схемы рис. 1.

Рис. 5. График выходного тока (I out) и выходного напряжения (V out) регулятора (рис. 4) в зависимости от нагрузки при токе ограничения 200 мА

Рис. 6. Графики зависимости мощности и напряжения на двигателе от нагрузки при токе ограничения 200 мА для варианта схемы на рис. 4
Заметна разница? Мощность на двигателе упала в два раза, и схема уже не является стабилизатором напряжения. Токоограничивающий резистор будет иметь номинал на уровне 6 Ом, и об оперативной подстройке тока можно будет забыть. При этом учтите, что напряжение холостого хода необходимо будет выставить не 5 В, а 6,4 В. Выйти из такой ситуации можно последовательным соединением двух каскадов на ИМС LM317T. Первый включается в режим стабилизатора тока на 200 мА, второй — в режим стабилизатора напряжения на 5 В. Но даже в таком варианте вы не получите ту гибкость в регулировке и управлении (в частности, управление включением/выключением малым током), которую дает предлагаемая схема на рис. 1.
Рассмотрим еще один пример — управление без применения ШИМ относительно мощным коллекторным двигателем, который управляет массивной инерционной нагрузкой, требующей относительно точного позиционирования при ее остановке и, главное, реверса. Скажем, это некоторая массивная поворотная платформа с исполнительным механизмом. Каковы особенности данного варианта управления? Как видим, здесь, кроме обеспечения защиты уже самого двигателя от перегрузки, необходимо обеспечить его реверс и достаточно точную остановку в заданном положении приводимой им в движение массивной платформы. Обычные регуляторы, основанные на анализе тока через обмотки двигателя (в момент стопорения его ротора), здесь не эффективны, поскольку нагрузка на двигатель и без того высока, соответственно, «выловить» увеличение тока в момент остановки практически невозможно. Иными словами, вычислить, что это — влияние нагрузки или остановка двигателя из-за остановки его ротора по изменению тока в обмотке, — невозможно. Решение такой задачи потребовалось автору статьи при разработке схемы управления коллекторным двигателем постоянного тока для поворота платформы с исполнительным механизмом робототех-нического оборудования с массой в 50 кг. Для разгрузки самого двигателя использовался редуктор с передаточным числом 810:1. Ясно, что если не принять специальных мер, то платформа не только не начнет движение и не остановится в заданной позиции, но при старте или принудительной остановке двигателя механическим стопором произойдет разрушение его редуктора. Это же может произойти и при вероятной аварийной остановке. Из-за относительно большой мощности примененного двигателя Como Drills 91908101 4,5-15 В 21,2 Вт (номер по RS-каталогу 321-3170) использование управления аналогично решению, приведенному на рис. 1, и широко используемым вариантам управления с ШИМ является явно нецелесообразным и невозможным. Как отмечалось выше, здесь требуется реверс двигателя и достаточно точная его остановка в условиях инерционной нагрузки. Удобное и, главное, гибкое решение для реализации данной задачи представлено на рис. 7. Автор статьи применяет данное устройство на практике как в качестве тестового модуля, так и в несколько измененном виде в составе серийного изделия.

Рис. 7. Схема управления для коллекторных двигателей средней мощности, работающих на инерционную нагрузку
Основа схемы — микросхема драйвера LMD18245T (ранее National Semiconductor Corp., в настоящее время Texas Instruments Inc.), обычно используемого для шаговых двигателей в нестандартном, не документированном в спецификации включении без импульсного управления. Учитывая допустимое использование этой ИМС в долговременном режиме прерывания подачи импульсов управления, предложенный вариант ее включения нельзя считать запрещенным. Подробно особенности данной ИМС описаны в . Напомним кратко: максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245T (резистор R4, рис. 4), и двоичным кодом на контактах цепи управления выходным током (выводы 8, 7, 6, 4). Формула для расчета максимального выходного тока драйвера приведена в спецификации , и для рассматриваемого случая он будет равен:
где V DAC ref — опорное напряжение ЦАП (в рассматриваемой схеме V DAC ref = 5 В); D — задействованные разряды ЦАП (в рассматриваемой схеме используются все 16 разрядов, «лог. 1» подана на все четыре входа программирования М1, М2, М3, М4); R S — номинал токоограничивающего резистора (R4 = 15 кОм).
Соответственно (поскольку задействованы все 16 разрядов ЦАП), ток ограничения драйвера при использовании токоограничивающего резистора R S номиналом 15 кОм (R4) составит 1,33 А. Для выбора и установки режима можно воспользоваться и таблицей, имеющейся в последнем выпуске спецификации .
Достоинством ИМС LMD18245T является то, что токоограничивающий резистор R4 не включен непосредственно в цепь питания двигателя, имеет достаточно большой собственный номинал (в рассматриваемом случае это 15 кОм), а значит, и маленькую рассеиваемую мощность и (главное!) совершенно не влияет на КПД схемы управления. Ограничение тока осуществляется таким образом, что для большинства применений нет надобности в охлаждающем радиаторе. При включении ключи выбранных плеч моста полностью открыты, а при достижении максимальной (заданной по входам «М» и номиналом резистора R4) величины тока осуществляется его «нарезка» (так называемый чоппинг, от англ. chopping ). Эта «нарезка» не является неким подобием ШИМ и осуществляется с заданными пользователем импульсами. Они не имеют крутых фронтов, длительность импульсов «нарезки» задается параллельной RC-цепочкой, подсоединенной к выводу 3 драйвера (элементы R5, C6), и равна 1,1 R5C6 в секундах. Это позволяет в некоторой мере упростить решение вопросов электромагнитной совместимости. Еще одним большим достоинством этой ИМС является то, что ее выходной каскад питается отдельно от цепей управления — таким образом можно легко установить требуемое напряжение для двигателя конкретного типа.
Включение двигателя осуществляется кнопкой «ПУСК» (В1). Никаких внешних генераторов не требуется. Выходной каскад LMD18245T выполнен по мостовой схеме и содержит все необходимые защитные элементы — быстродействующие диоды, установленные параллельно выходным ключам. Таким образом, можно легко осуществлять реверс двигателя без помощи мощных реле, дополнительных схем управления и защитных элементов. Реверс выполняется подачей логической единицы переключателем «направление» (S1). Кроме того, данная ИМС позволяет легко реализовать и режим принудительного торможения двигателя в момент остановки. Это делается замыканием обмотки ротора двигателя. Остановка с торможением после снятия команды ПУСК осуществляется подачей логической единицы на вывод 10 (вход BRAKE), и обмотка двигателя закорачивается внутренними ключами драйвера. В указанной схеме реализован двойной режим управления остановкой двигателя: во-первых, это ограничение тока до нуля путем подачи логических нулей на входы программирования уровня максимального тока (выводы 8, 7, 6, 4); во-вторых, подачей логической единицы на вход торможения BRAKE (вывод 10). Такой подход обеспечивает надежную остановку механизма в целом в заданном положении без использования упорных стопоров. Необходимо отметить, что в общем случае принудительная подача нулей на разряды ЦАП не является строго необходимой, все это предусмотрено внутренней структурой логики ИМС LMD18245T, и ИМС D1 (рис. 7) можно было бы считать излишеством, если бы не требовалось устранить дребезг контактов кнопки включения двигателя.
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
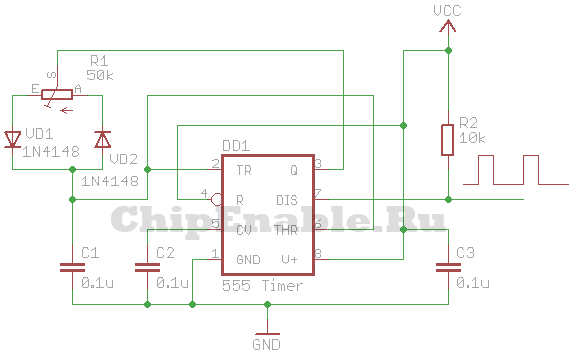
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
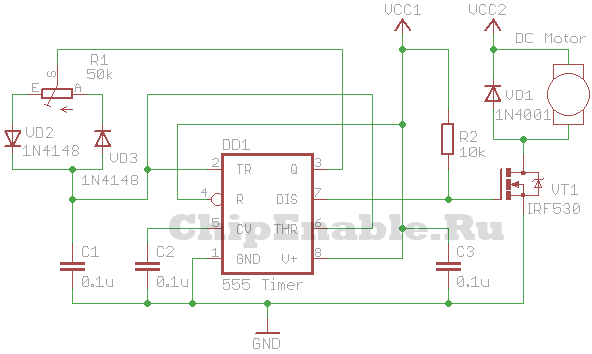
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.







