DC շարժիչի կառավարման միացում: Ինչպե՞ս է կառավարվում DC շարժիչը: DC շարժիչի կառավարում: DC շարժիչի նախագծում և սպասարկում
Էլեկտրական շարժիչներ ուղղակի հոսանքլայնորեն կիրառվում են արդյունաբերության, տրանսպորտի և այլ ոլորտներում։ AWD10 և AWD15 կոմուտատորի շարժիչի կառավարման ստորաբաժանումները, որոնք մշակվել են հայրենական Electronics Laboratory ընկերության կողմից, թույլ են տալիս վերահսկել շարժիչի պտտման արագությունն ու ուղղությունը մինչև 90 Վ աշխատանքային լարմամբ:
ՓԲԸ Էլեկտրոնիկայի լաբորատորիա, Մոսկվա
բոցավառ շարժիչ
Վերջին երկու-երեք դարերի ո՞ր գյուտը կառանձնացնեիք որպես ճակատագրական, այն գլխավորը, որի վրա հիմնված է մեր ողջ ժամանակակից տեխնիկական բարեկեցությունը։ Երևի ափը պետք է տրվի գոլորշու շարժիչին։ Շատ բաներ, որոնց մասին մարդիկ երազում էին հազարավոր տարիներ, գրեթե ակնթարթորեն իրականություն դարձան հիմնարար քայլ կատարելուց հետո՝ հայտնագործված մեխանիզմների սիրտը, շարժիչը, շարժիչը: Նրա հետ նավերը լիովին հանգիստ գնացին, մի մարդ սովորեց թռչել, «կրակոտ շարժիչով» շոգեքարշները խժռեցին հսկայական հեռավորություններ, հնարավոր եղավ արագորեն մշակել մեծ հողատարածք ...
Ուրիշ բան, որ շարժիչները տալիս են տհաճ կողմնակի ազդեցություններ՝ բարձրացնում են ջերմաստիճանը, աղտոտում են օդը թունավոր գազերով, աղմուկ են բարձրացնում։ Այնուամենայնիվ, մենք կկենտրոնանանք առավել էկոլոգիապես մաքուր, և, հետևաբար, այսօր տեղին բազմազանության վրա՝ էլեկտրական շարժիչներ: Ավելի ճիշտ, մենք կդիտարկենք DC շարժիչի կառավարման միավորները, որոնք թույլ են տալիս վերահսկել դրանց արագությունը և ոլորող մոմենտը: Այս սարքերն են, որոնք կքննարկվեն հոդվածում:
DC շարժիչներ
Բոլոր էլեկտրական շարժիչները բաժանված են երկու տեսակի՝ AC և DC: Շարժիչներ փոփոխական հոսանքլայնորեն կիրառվում են արդյունաբերության մեջ՝ սնուցում են ծանր մեքենաները, մեծ և ծանր կայանքները։ Ուղղակի հոսանքը հարմար է ավելի փոքր և բարակ մեխանիզմների համար (օրինակ, էլեկտրոնիկան կարող է աշխատել միայն ուղղակի հոսանքի վրա): DC շարժիչները, մասնավորապես, սնուցում են անլար սարքերին՝ էլեկտրական գործիքներ կամ մարտկոցներով աշխատող մեքենաներ, ներառյալ ժամանակակից էլեկտրական մեքենաները: Առանց DC շարժիչների անհնար է պատկերացնել տրանսպորտի բազմաթիվ տեսակներ՝ էլեկտրագնացքներ, էլեկտրական լոկոմոտիվներ, տրամվայներ, տրոլեյբուսներ, մետրո։ Այնուամենայնիվ, դրանք օգտագործվում են նաև արդյունաբերության մեջ, օրինակ, մետաղահատ մեքենաները, եռակցման սարքավորումները և շատ այլ սարքեր աշխատում են դրանց օգնությամբ։
DC շարժիչները լինում են կոլեկտոր, փական և քայլ՝ կախված նրանից, թե մագնիսական դաշտերից որն է հաստատուն: Փականը և ստեպերը պատկանում են առանց խոզանակների դասին: Առանց խոզանակների շարժիչները սովորաբար թանկ են՝ ռոտորի դիզայնում թանկարժեք մշտական մագնիսների օգտագործման պատճառով: Քայլային շարժիչները հակված են ցածր էներգիայի կատարողականություն և ցածր պտտող մոմենտ բարձր արագությունների դեպքում:
Մենք թվարկում ենք կոլեկտորային շարժիչների առավելությունները.
Մեծ ոլորող մոմենտ, զարգացած համեմատաբար փոքր ընդհանուր չափսերով;
Պտտման արագության կարգավորման լայն շրջանակ;
Մեծ մեկնարկային ոլորող մոմենտ;
Բարձր արդյունավետություն մինչև 90%:
Թերությունները ներառում են հետևյալը.
Կոլեկտորի և խոզանակների խնամքի և մոնիտորինգի անհրաժեշտությունը նման էլեկտրական շարժիչի շահագործման ողջ ժամանակահատվածում.
EMI ճառագայթում խոզանակների և կոմուտատորի միջև կայծի պատճառով;
Արմատուրայի համեմատաբար մեծ զանգված և իներցիա, որը հանգեցնում է էլեկտրական շարժիչի արագության նվազմանը։
AWD10 և AWD15 կոլեկտորային շարժիչի կառավարման միավորներ
AWD10 և AWD15 ՓԲԸ Էլեկտրոնիկայի լաբորատորիայի կողմից արտադրված կոլեկտորային շարժիչի կառավարման ստորաբաժանումներն ունեն աշխատանքի նույն սկզբունքը, որը հիմնված է իմպուլսային լայնության մոդուլյացիայի (PWM) վրա և նախատեսված է մինչև 90 Վ աշխատանքային լարման դեպքում շարժիչի պտտման արագությունն ու ուղղությունը վերահսկելու համար: .

Բրինձ. մեկ.Կառավարման միավոր AWD10
«Էլեկտրոնիկայի լաբորատորիա» ՓԲԸ ընկերությունը հիմնադրվել է 2005 թվականին Մոսկվայի պետական տեխնիկական համալսարանի շրջանավարտների կողմից: N. E. Bauman. Գործունեության հիմնական ուղղությունը արդյունաբերության համար հսկողության և գործիքավորման մշակումն ու արտադրությունն է: AWD10 (Նկար 1), AWD6 և AWD8 կառավարման միավորները մշակվել են 2006 թվականին որպես DC կառավարման մոդուլներ, որոնք օգտագործվում են մեր սեփական արտադրության սարքերում: 2007 թվականին, իրական պայմաններում երկար փորձարկումներից հետո, այս սարքերը գործարկվեցին շարք: AWD15 կառավարման միավորը (նկ. 2) մշակվել է 2009 թվականի վերջին՝ որպես AWD6 և AWD8 չշրջելի կառավարման միավորների փոխարինում:

Բրինձ. 2. AWD15 կառավարման միավոր
AWD10 բլոկի բազմաթիվ կարգավորումներ թույլ են տալիս ճկուն կերպով հարմարեցնել այն տարբեր առաջադրանքներին: Համամասնական ինտեգրալ ածանցյալ (PID) կարգավորիչը, որը տեղադրված է միկրոկոնտրոլերի վրա կարգավորելի գործակիցներով, թույլ է տալիս կայունացնել շարժիչի արագությունը ցանկացած բեռներով, ներառյալ փոփոխականները: Ինչպես հետադարձ կապ AWD10 կառավարման ստորաբաժանման կարգավորիչը, շարժիչի ետ-EMF ազդանշանը գեներատորի ռեժիմում աշխատելու պահին, կոդավորիչից կամ դահլիճի սենսորից զարկերակային ազդանշան կամ 0-ից 5 Վ անալոգային ազդանշան: PI կարգավորիչը ներդրված է AWD15 կառավարման միավորի միկրոկառավարիչի վրա, և որպես հետադարձ կապ օգտագործվում է միայն շարժիչի հետևի EMF-ը: Սա հնարավորություն է տալիս կայունացնել պտտման արագությունը (1–5%) կամ առարկայի տեղաշարժը առանց լրացուցիչ հետադարձ տարրերի օգտագործման, ինչը հնարավորություն է տալիս չբարդացնել սարքի դիզայնը, որը չի արագության կայունացման խիստ պահանջներ դնել:
Սկսելու համար, եկեք ավելի սերտ նայենք սովորական DC շարժիչին: Ցանկացած շարժիչ ունի երկու հիմնական մաս՝ ռոտոր և ստատոր: Կոլեկտորային շարժիչում ստատորը ֆիքսված մաս է, այն բաղկացած է մշտական մագնիսներից (կամ ավելի հզոր էլեկտրամագնիսական շարժիչներում): Ռոտոր (արմատուրա) - պտտվում է, համակցված է շարժիչի լիսեռի հետ և բաղկացած է բազմաթիվ պարույրներից (առնվազն երեքից): Կոլեկտորը (խոզանակ-կոլեկտորային ժողով) պատասխանատու է ռոտորային կծիկների ելքերի փոխարկման համար: Նման շարժիչի հոսանքը ռոտորային կծիկներին մատակարարվում է սահող կոնտակտների (կամ խոզանակների) միջոցով: Միանգամից միացված է միայն մեկ կծիկ, և այն ստեղծում է շարժիչի ոլորող մոմենտ՝ անցնող հոսանքի պատճառով։
Շղթայի հիմնական տարրերի տեսանկյունից ցանկացած շարժիչ կարող է ներկայացվել որպես հետևյալ համարժեք միացում.
Երբ շարժիչը միացված է DC աղբյուրին և դեռ չի սկսել պտտվել, դա նորմալ դիմադրություն է: Այսինքն, հոսանքը հոսում է դրա միջով Օհմի օրենքի և դրա ոլորման դիմադրության համաձայն: Գերակշռում է R բաղադրիչը: Ինդուկտիվությունը սկսում է ազդել, երբ լարումը հաստատուն չէ, օրինակ, եթե շարժիչը սնուցվում է PWM ազդանշանով:
Ռոտորի դիմադրությունը և ինդուկտիվությունը սովորաբար շատ փոքր են: Այն կարելի է չափել սովորական մուլտիմետրով։ Փոքր մոդելի շարժիչները ունեն 1-10 ohms դիմադրություն: Հետևաբար, շարժիչի մեկնարկի ժամանակ (երբ այն դեռ չի սկսել պտտվել), հոսանքը մեծապես գերազանցում է շարժիչի գործող հոսանքը, և եթե շարժիչը երկար ժամանակ անշարժ է (այն խցանված է), ապա այդպիսի բարձր հոսանքը կարող է հանգեցնել շարժիչի գերտաքացման և ձախողման:
Ռոտորային կծիկների ինդուկտիվությունը փորձում է ոլորունների միջով հոսող հոսանքը մշտական պահել: Դրա ազդեցությունը նկատելի է միայն այն ժամանակ, երբ լարումը փոխվում է։ Երբ շարժիչը սկսում է պտտվել, կոլեկտորը սկսում է միացնել ռոտորային կծիկները, ինչը հանգեցնում է լարման փոփոխության: Ինդուկտիվությունը փորձում է այս պահերին լարման պատճառով շարժիչով հոսող հոսանքը պահել մշտական մակարդակի վրա:
Ռոտորային կծիկի պտտման ընթացքում նրանք սկսում են հոսանք առաջացնել (ինչպես գեներատորը) - առաջանում է հետևի EMF: Որքան արագ է ռոտորը պտտվում, այնքան բարձր է հետևի EMF-ը, որը առաջանում է կծիկների մեջ, և քանի որ այն ուղղված է մատակարարման լարման դեմ, շարժիչի կողմից սպառվող հոսանքը նվազում է:
Հետևյալում մեզ անհրաժեշտ կլինեն հետևյալ եզրակացությունները.
քանի դեռ շարժիչը չի սկսում պտտվել, դա դիմադրություն է
եթե շարժիչի վրա կիրառեք փոփոխվող լարում (օրինակ՝ PWM), ապա ինդուկտիվությունը մեծ ազդեցություն կունենա, այն կդիմադրի շարժիչի միջոցով հոսանքի փոփոխությանը։
երբ շարժիչը պտտվում է, այն գեներատոր է, և դրա շնորհիվ ընթացիկ սպառումը նվազում է (արդյունքում լարումը V - Vbemf է):
Ինչպես միացնել շարժիչը MK-ին
Այս հոդվածում մենք կհասկանանք, թե ինչպես օգտագործել MK-ն սովորական DC շարժիչի պտտման արագությունն ու ուղղությունը վերահսկելու համար:
Որպեսզի DC կոլեկտորի շարժիչը սկսի պտտվել, բավական է դրա վրա որոշակի լարում կիրառել: Այս լարման բևեռականությունը կորոշի նրա պտտման ուղղությունը, իսկ լարման մեծությունը՝ պտտման արագությունը։ Լարումը չի կարող փոխվել անորոշ ժամանակով: Յուրաքանչյուր շարժիչ նախատեսված է որոշակի լարման միջակայքի համար: Երբ լարումը բարձրանում է, շարժիչի հոսանքը կաճի, և այն կսկսի գերտաքանալ և կարող է այրվել: Որոշակի շարժիչի հետևյալ գրաֆիկը հստակ ցույց է տալիս նրա հիմնական ցուցանիշների միջև կապը:

Առավելագույն հզորությունը (Torque - TORQUE) շարժիչը հասնում է առավելագույն հոսանքի ժամանակ: Իսկ հոսանքի և ոլորող մոմենտների կախվածությունը գծային է։ Շարժիչը հասնում է իր առավելագույն արագությանը, երբ բեռ չկա (անգործության ժամանակ), բեռի ավելացմամբ, ռոտացիայի արագությունը նվազում է: Շարժիչի անձնագրում նշված է անվանական աշխատանքային լարումը, և դրա համար տրված է նաև այս գրաֆիկը: Եթե դուք նվազեցնեք լարումը, ապա ռոտացիայի արագությունը և մնացած բոլոր ցուցանիշները նույնպես կնվազեն: Որպես կանոն, անվանական լարման 30-50% -ից ցածր շարժիչը կդադարի պտտվել: Եթե շարժիչը չի կարող պտտել լիսեռը (այն խցանված է), ապա իրականում այն կդառնա դիմադրություն, և սպառված հոսանքը հասնում է առավելագույն արժեքի ՝ կախված դրա ոլորունների ներքին դիմադրությունից: Սովորական շարժիչը նախատեսված չէ այս ռեժիմում աշխատելու համար և կարող է այրվել:
Տեսնենք, թե ինչպես է ընթացիկը փոխվում իրական R380-2580 շարժիչի բեռից:

Մենք տեսնում ենք, որ այս շարժիչի աշխատանքային լարումը 12 Վ է, բեռի տակ ընթացիկ սպառումը 1,5 Ա է: Շարժիչի կանգառի հոսանքը բարձրանում է մինչև 8 Ա, իսկ պարապ ռոտացիայի դեպքում ընթացիկ սպառումը կազմում է ընդամենը 0,8 Ա:
Ինչպես գիտենք, միկրոկոնտրոլերի պորտը չի կարող ապահովել ավելի քան 50 մԱ, իսկ 12 Վ սնուցման լարումը չափազանց բարձր է դրա համար: Շարժիչները կառավարելու համար մեզ անհրաժեշտ է էլեկտրոնային բանալի՝ տրանզիստոր, վերցրեք սովորական NPN երկբևեռ տրանզիստոր և միացրեք այն հետևյալի համաձայն. սխալսխեման։

Որպեսզի շարժիչը սկսի պտտվել, պետք է փոքր հոսանք կիրառվի տրանզիստորի հիմքի վրա, այնուհետև տրանզիստորը կբացվի և կկարողանա շատ ավելի շատ հոսանք և լարում անցնել իր միջով. շարժիչը կպտտվի: Հարկ է նշել, որ եթե մենք հավաքենք նման սխեմա, ապա տրանզիստորը շատ շուտով կխափանվի, եթե ոչ անմիջապես. Որպեսզի դա տեղի չունենա, այն պետք է պաշտպանված լինի:
Ինչպես արդեն գիտենք, շարժիչի բաղադրիչներից մեկը՝ ինդուկտիվությունը, դիմակայում է հոսանքի փոփոխությանը: Հետևաբար, երբ մենք փակում ենք տրանզիստորը, որպեսզի անջատենք շարժիչը, տրանզիստորի դիմադրությունը կտրուկ կբարձրանա, և այն կդադարի հոսանք անցնել իր միջով: Այնուամենայնիվ, ինդուկտիվությունը կդիմադրի դրան, և հոսանքը նույն մակարդակի վրա պահելու համար, ըստ Օհմի օրենքի, տրանզիստորի կոլեկտորի վրա լարումը կսկսի կտրուկ աճել (այն կարող է հասնել նույնիսկ 1000 Վ-ի, թեև շատ կարճ ժամանակով): ժամանակ) և տրանզիստորը կվառվի: Որպեսզի դա տեղի չունենա, անհրաժեշտ է շարժիչի ոլորուն զուգահեռ դիոդ դնել, որը կբացի հակադարձ լարման ճանապարհը և կփակի այն շարժիչի ոլորուն վրա՝ դրանով իսկ պաշտպանելով տրանզիստորը։
Նաև բոլոր մշտական շարժիչներն ունեն ևս մեկ խնդիր՝ պտտման ժամանակ կոլեկտորի մեջ մեխանիկական շփումը իդեալական չէ, խոզանակները շահագործման ընթացքում կայծ են տալիս՝ ստեղծելով միջամտություն, ինչը կարող է հանգեցնել միկրոկառավարիչի խափանումների: Այս միջամտությունը նվազեցնելու համար անհրաժեշտ է օգտագործել փոքր կոնդենսատորներ, որոնք զուգահեռաբար միացված են շարժիչի լարերին (որքան հնարավոր է մոտ ինքնին շարժիչին): Ահա և եզրափակիչը ճիշտմիացում (դիոդը պարտադիր չէ, որ լինի Schottky, բայց նախընտրելի է):

Երկբևեռ տրանզիստորները բաց վիճակում, նրանք իրենց պահում են դիոդների պես (մոտ 0,7 Վ ընկնում է դրանց վրա): Եվ դա, իր հերթին, հանգեցնում է նրանց տաքացմանը բարձր հոսանքների ժամանակ և նվազեցնում է շարժիչի կառավարման սխեմայի արդյունավետությունը: Հետեւաբար, ավելի լավ է կառավարել շարժիչները դաշտային ազդեցության (MOSFET) տրանզիստորներով: Ներկայումս դրանք բավականին տարածված են և ունեն ցածր գին։ Նրանց ցածր միացման դիմադրությունը թույլ է տալիս միացնել շատ բարձր հոսանքները նվազագույն կորուստներով: Այնուամենայնիվ, նրանք նույնպես ունեն իրենց թերությունները. Քանի որ MOSFET-ներն աշխատում են լարման, ոչ թե հոսանքի (և սովորաբար 10 Վ), դուք կամ պետք է ընտրեք հատուկ տրամաբանական MOSFET-ներ, որոնք կարող են աշխատել մինչև 1.8..2.5 Վ, կամ օգտագործել հատուկ լարման պոմպերի սխեմաներ (FET դրայվերներ): Ինչպես ընտրել MOSFET-ը ձեր միացման համար, մենք կքննարկենք այլ հոդվածներում, կոնկրետ սարքերի վրա:
Այժմ, միկրոկառավարիչի ելքին տրամաբանական միավոր մատակարարելով, մենք կստիպենք շարժիչը պտտել, և տրամաբանական զրոն կկանգնի: Այնուամենայնիվ, այն կպտտվի հաստատուն արագությամբ և միայն մեկ ուղղությամբ: Ես կցանկանայի, որ կարողանայի փոխել շարժիչի պտտման ուղղությունը, ինչպես նաև դրա արագությունը: Մտածեք, թե ինչպես կարելի է դա հասնել միկրոկոնտրոլերի միջոցով:
H-Bridge - փոխել շարժիչի ռոտացիայի ուղղությունը
Շարժիչի պտտման ուղղությունը վերահսկելու համար կա հատուկ շղթա, որը կոչվում է H-կամուրջ (շղթան նման է H տառին):

H-կամուրջի շղթայում N-ալիքները միշտ օգտագործվում են որպես ստորին տրանզիստորներ, բայց վերինները կարող են լինել կամ N-ալիք կամ P-ալիք: P-channel տրանզիստորները վերին բանալին ավելի հեշտ է կառավարել, բավական է դարպասի մոտ շեղման լարման մակարդակի միացում կազմել: Դա անելու համար դուք կարող եք օգտագործել ցածր էներգիայի N-ալիք դաշտային ազդեցություն կամ երկբևեռ տրանզիստոր: Ստորին տրանզիստորը կարող է կառավարվել անմիջապես MK-ից, եթե ընտրեք հատուկ տրամաբանական դաշտի ազդեցության տրանզիստոր:
Եթե ձեր միացումն օգտագործելու է բարձր լարման DC շարժիչ (ավելի քան 24 Վ) կամ հզոր շարժիչ՝ 10 Ա-ից ավելի հոսանքներով, ապա ավելի լավ է օգտագործել հատուկ միկրոսխեմաներ՝ վարորդներ։ MOSFET տրանզիստոր ov. Վարորդները, որպես կանոն, վերահսկվում են միկրոկոնտրոլերի ազդանշաններով 2-ից 5 Վ, իսկ ելքի վրա նրանք ստեղծում են MOSFET տրանզիստորների ամբողջական բացման համար անհրաժեշտ լարումը, սովորաբար 10-15 Վ: Վարորդները նաև ապահովում են մեծ իմպուլսային հոսանք, որն անհրաժեշտ է դաշտային տրանզիստորների բացումը արագացնելու համար: Վարորդների օգնությամբ հեշտ է կազմակերպել վերին N-ալիք տրանզիստորի կառավարումը։ Շատ լավ դրայվեր է ST-ի L6387D չիպը։ Այս չիպը լավ է, քանի որ այն չի պահանջում դիոդ լարման պոմպի միացման համար: Ահա թե ինչպես է այն միացված 2 N-ալիք տրանզիստորների վրա H-կամուրջը կառավարելու համար:

N-ալիք դաշտային ազդեցության տրանզիստորներն ավելի էժան են, քան P-ալիքները, ինչպես նաև ունեն ավելի ցածր վիճակի դիմադրություն, ինչը թույլ է տալիս միացնել բարձր հոսանքները: Բայց նրանց ավելի դժվար է կառավարել վերևի դիրքում: Վերին անջատիչում N-ալիք տրանզիստոր օգտագործելու խնդիրն այն է, որ այն բացելու համար անհրաժեշտ է 10 Վ լարում կիրառել Աղբյուրի նկատմամբ, և ինչպես տեսնում եք դիագրամում, այնտեղ կարող է լինել ամբողջ շարժիչի մատակարարման լարումը, ոչ 0 վոլտ: Այսպիսով, 10V + շարժիչի մատակարարման լարումը պետք է կիրառվի բազայի վրա: Լարման բարձրացման համար անհրաժեշտ է հատուկ բեռնախցիկի միացում: Սովորաբար, այդ նպատակների համար կոնդենսատորի և դիոդի վրա օգտագործվում է լարման պոմպի միացում: Այնուամենայնիվ, նման միացումն աշխատում է միայն այն դեպքում, եթե դուք անընդհատ լիցքավորեք կոնդենսատորը `բացելով, փակելով ստորին տրանզիստորը (PWM հսկողության մեջ): Որպեսզի կարողանաք վերին տրանզիստորը մշտապես բաց պահել, անհրաժեշտ է ավելի բարդացնել միացումը՝ ավելացնել արտաքին կոնդենսատորի սնուցման միացում: Ահա N-ալիքով տրանզիստորի շարժիչ սխեմայի օրինակ՝ առանց վարորդի IC-ների օգտագործման:

Եկեք անցնենք շարժիչի պտտման արագության վերահսկմանը:
PWM ազդանշան - վերահսկել շարժիչի ռոտացիայի արագությունը
DC շարժիչները ունեն գծային հարաբերություն ռոտացիայի արագության և կիրառվող լարման միջև: Այսպիսով, ռոտացիայի արագությունը նվազեցնելու համար անհրաժեշտ է ավելի քիչ լարում կիրառել։ Բայց մենք պետք է հիշենք, որ լարման անկման դեպքում շարժիչի հզորությունը նվազում է: Հետևաբար, գործնականում շարժիչի արագությունը կարող է վերահսկվել միայն շարժիչի ամբողջ արագության 30%-50%-ի սահմաններում: Շարժիչի արագությունը առանց հոսանքի կորստի վերահսկելու համար անհրաժեշտ է շարժիչից արձագանքել պտտման արագությանը, օրինակ, ինչպես էլեկտրական պտուտակահանում: Այս կառավարման ռեժիմը պահանջում է ավելի բարդ միացում: Մենք կքննարկենք մի պարզ տարբերակ՝ շարժիչի արագության վերահսկում առանց հետադարձ կապի:
Այսպիսով, մենք պետք է փոխենք շարժիչին մատակարարվող լարումը: Մեր տրամադրության տակ կա MOSFET տրանզիստոր: Մենք հիշում ենք, որ մեր շարժիչն ունի ինդուկտիվություն: Ինդուկտորը դիմադրում է հոսանքի փոփոխությանը: Իսկ եթե դուք արագ միացնեք և անջատեք շարժիչի լարումը, ապա անջատման պահին հոսանքը կշարունակի հոսել ինդուկտիվության պատճառով։ Իսկ շարժիչը կշարունակի պտտվել իներցիայով, և չի կանգնի: Բայց, բնականաբար, այն ավելի դանդաղ կպտտվի, նրա ոլորունների վրա միջին լարումը կլինի ավելի ցածր:
Միկրոկառավարիչը, պարզապես հիանալի կերպով կարող է առաջացնել իմպուլսային PWM (PWM) ազդանշան: Եվ շարժիչը կարողանում է ինտեգրել այս ազդանշանը (միջին) շնորհիվ ոլորունների ինդուկտիվության և ռոտորի իներցիայի: Շարժիչի ստացած միջին լարումը և, հետևաբար, արագությունը կախված կլինի PWM ազդանշանի աշխատանքային ցիկլից (հերթական գործակից):
Ինչ PWM հաճախականություն է անհրաժեշտ շարժիչի ավելի լավ կառավարման համար: Պատասխանը շատ պարզ է, որքան շատ, այնքան լավ։ Նվազագույն հաճախականությունը կախված է շարժիչի ինդուկտիվությունից, ինչպես նաև ռոտորի զանգվածից և շարժիչի լիսեռի բեռից: Եթե մենք մոդելավորենք PWM շարժիչի կառավարումը էլեկտրական սիմուլյատորում (օրինակ, PROTEUS), ապա կերեւա, որ որքան բարձր է PWM հաճախականությունը, այնքան ավելի հավասարաչափ հոսանքն է հոսում շարժիչի միջով (ալիքային հոսանքը - նվազում է հաճախականության աճով): Ցածր հաճախականություն.

բարձր հաճախություն:

Եթե հաճախականությունը որոշակի մակարդակից իջնի, հոսանքը կդառնա ընդհատվող (այն կիջնի զրոյի) և արդյունքում շարժիչը չի կարողանա պտտվել:

Հիանալի է, պարզ է: Մենք բարձրացնում ենք PWM հաճախականությունը, օրինակ 1 ՄՀց, և ցանկացած շարժիչ կունենա բավարար: Կյանքում ամեն ինչ այնքան էլ պարզ չէ. Բոլոր հնարավոր խնդիրները հասկանալու համար մենք կարող ենք պարզապես վերցնել MOSFET-ի դարպասը որպես իդեալական կոնդենսատոր: Որպեսզի տրանզիստորը լիովին բացվի, կոնդենսատորը պետք է լիցքավորվի մինչև 10 Վ (իրականում ավելի քիչ): Որքան շատ հոսանք կարող ենք մղել կոնդենսատորի մեջ, այնքան ավելի արագ է այն լիցքավորվելու, ինչը նշանակում է, որ տրանզիստորն ավելի արագ կբացվի: Տրանզիստորի բացման գործընթացում դրա վրա հոսանքն ու լարումը կլինեն առավելագույնը, և որքան երկար լինի այս անգամ, այնքան տրանզիստորը կտաքանա: Տվյալների թերթիկը սովորաբար ունի այնպիսի պարամետր, ինչպիսին է Qgate-ը` լրիվ լիցքը, որը պետք է փոխանցվի տրանզիստորին, որպեսզի այն ամբողջությամբ բացվի:

Շարժիչների ինդուկտիվությունն այնքան էլ փոքր չէ, և նման բարձր հաճախականություններ պետք չեն։ DC շարժիչները կառավարելու համար բավական է 8 կՀց հաճախականությունը, ցանկալի է մոտ 20 կՀց (ձայնային տիրույթից դուրս):
Բացի այդ, հարկ է նշել, որ մեկնարկային հոսանքը նվազեցնելու համար անհրաժեշտ է սկզբում սահուն բարձրացնել PWM հաճախականությունը: Եվ դեռ - ավելի լավ է վերահսկել շարժիչի մեկնարկային հոսանքը, օգտագործելով ընթացիկ սենսորները:
PWM շարժիչի կառավարումը ներառում է լարման շատ արագ փոփոխություն 0-ից մինչև առավելագույնը, ինչը մեծ խնդիրներ է ստեղծում տախտակի հետագծման ժամանակ: Եկեք համառոտ թվարկենք այն կանոնները, որոնք պետք է պահպանվեն տախտակը հետագծելիս:
Շարժիչները և միկրոկոնտրոլերը կառավարելու հիմքերը պետք է առանձնացված լինեն, մի կետում միացված լինեն բարակ հաղորդիչով, օրինակ՝ 0,3 մմ, հնարավորինս մոտ ամբողջ շղթայի հոսանքի լարերին։
MOSFET-ի վարորդները պետք է հնարավորինս մոտ լինեն հենց MOSFET-ներին:
Վերահսկիչ տարածքի կատարումը պարտադիր է երկկողմանի, գերադասելի է մի կողմից հողային շերտով: Իմպուլսների կառավարման ժամանակ տեղի է ունենում էլեկտրամագնիսական միջամտություն, այն նվազեցնելու համար հողի շերտը պետք է մոտակայքում լինի:
Համոզվեք, որ ունենաք մեծ իմպուլսային հոսանքների անցման գոտուն հնարավորինս մոտ կոնդենսատոր: Եթե չկա այդպիսի կոնդենսատոր, ապա էլեկտրահաղորդման գծի լարումը խիստ կթուլանա, և միկրոկոնտրոլերը անընդհատ կվերակայվի: Բացի այդ, առանց այդպիսի կոնդենսատորի, հոսանքի լարերի ինդուկտիվության պատճառով էլեկտրահաղորդման գծի վրա լարումը կարող է մի քանի անգամ աճել, և բաղադրիչները կխափանվեն:
Ավելի մանրամասն, մենք կքննարկենք, թե ինչպես են այս կանոնները գործում կոնկրետ սարքերի վրա:
PWM ազդանշան H-Bridge-ում
Տեսնենք, թե ինչպես է հսկիչ սխեման ազդում մեր էլեկտրոնային բանալիների ջեռուցման վրա: Ասենք, որ մենք կառավարում ենք շարժիչը PWM ազդանշանով 50% աշխատանքային ցիկլով, և շարժիչը պտտվում է մեկ ուղղությամբ:
Ամենահեշտ տարբերակը երկու տրանզիստորներից մեկի վրա PWM ազդանշան կիրառելն է, իսկ մյուսը մշտապես բաց թողնելը: Սովորաբար PWM-ն այս դեպքում կիրառվում է ստորին տրանզիստորի վրա (N տիպ), որը սովորաբար ավելի արագ է: Այս դեպքում ստորինի ջեռուցումն ավելի մեծ կլինի, քան վերինը՝ տրանզիստորի միացման ժամանակ արձակված ջերմության քանակով։ Հաշիվը հավասարեցնելու համար դուք կարող եք հերթափոխով կիրառել PWM ազդանշան կամ վերին (եթե դրանք նույնն են), ապա ստորին տրանզիստորին: Հնարավոր է նաև միաժամանակ երկու տրանզիստորների վրա կիրառել PWM, սակայն տրանզիստորների տարբերության պատճառով դա արդյունավետ չի լինի, ինչպես նաև կբարձրացնի տաքացումը՝ միացնելով տրանզիստորները: Այս կառավարման սխեմայով մյուս երկու տրանզիստորները աշխատում են որպես դիոդներ: Բարեբախտաբար, դիոդի միջով ամենաբարձր հոսանքը կլինի ամենաբարձր PWM աշխատանքային ցիկլում, մինչդեռ դիոդը միացված կլինի շատ կարճ ժամանակով:
Դիոդների միջոցով հոսանքը վերացնելու համար, որոնք զգալի ջեռուցում են տալիս, դուք երբեք չեք կարող անջատել շարժիչը լարումից, այլ փոխարենը շրջեք այն հակառակ ուղղությամբ: Այսպիսով, մենք պետք է, օրինակ, PWM ազդանշանի 70%-ը շրջենք դեպի աջ, իսկ 30%-ը՝ ձախ։ Սա կհանգեցնի ընդհանուր 70%-30%=40% արագության դեպի աջ: Բայց դիոդները չեն ներգրավվի: Կառավարման այս մեթոդը կոչվում է կոմպլեմենտար: Նման միացման համար անհրաժեշտ է մեծ կոնդենսատոր էլեկտրահաղորդման գծի վրա, ինչպես նաև հոսանքի աղբյուր, որը կարող է հոսանք քաշել (օրինակ՝ մարտկոց):
Շարժիչը տարբեր ուղղություններով պտտելու փոխարեն կարող եք օգնել դիոդներին, մասնավորապես՝ դանդաղեցնել շարժիչը, բացել երկու վերին տրանզիստորները PWM ազդանշանի ցածր մակարդակի պահին: Գործնականում այս բոլոր մեթոդները չեն տալիս շարժիչի արագության զգալի փոփոխություն, բայց թույլ են տալիս արդյունավետորեն վերահսկել դաշտային տրանզիստորների ջեռուցումը: Կառավարման տարբեր սխեմաների առանձնահատկությունների մասին լրացուցիչ մանրամասներ կարելի է գտնել այս հոդվածում:
Սա եզրափակում է մեր հոդվածը շարժիչների մասին: Այժմ մենք կարող ենք անցնել պրակտիկայի. մենք դա կանենք ռոբոտի համար:
Ներկայումս DC շարժիչները լայնորեն օգտագործվում են տարբեր ոլորտներում: DC շարժիչներ օգտագործվում են այնտեղ, որտեղ անհրաժեշտ է արագության և ոլորող մոմենտների սահուն և ճշգրիտ վերահսկում լայն տիրույթում: Այս հոդվածում ես կխոսեմ DC շարժիչի համար կառավարման միավոր ստեղծելու մասին, որը թույլ կտա փոխել շարժիչի լիսեռի արագությունը և կայունացնել արագությունը որոշակի մակարդակում՝ անկախ շարժիչի լիսեռի բեռից:
Մշակումը հիմնված է մեկ օղակի կառավարման համակարգով servo drive-ի շահագործման սկզբունքի վրա:
Վերահսկիչ միավորը բաղկացած է հետևյալ հանգույցներից.
- SIFU (Զարկերակային համակարգ - փուլային կառավարում)
- Կարգավորող
- Պաշտպանություն
Սկավառակի սխեմատիկ դիագրամը ներկայացված է ստորև:
Ավելի մեծ
Դիտարկենք սխեման ավելի մանրամասն:
Այսպիսով, SIFU (Pulse - Phase Control System) - ցանցի սինուսոիդային լարումը վերածում է շարքի ուղղանկյուն իմպուլսներանցնելով ուժային թրիստորների կառավարման էլեկտրոդներին: Երբ կառավարման միավորը միացված է AC լարման 14-16v արժեքը գնում է D1 կամրջի ուղղիչին, որտեղ այն վերածվում է իմպուլսացիոն լարման, որը ծառայում է ոչ միայն միացումն սնուցելու, այլև սկավառակի աշխատանքի համաժամացմանը: Դիոդ D2-ը կանխում է իմպուլսների հարթեցումը C1 կոնդենսատորի կողմից: Այնուհետև իմպուլսները սնվում են «զրոյական դետեկտորին»՝ DA1.1-ին, որը հավաքված է LM324 միկրոսխեմայի մեկ օպերացիոն ուժեղացուցիչի վրա, որն աշխատում է համեմատական ռեժիմում: Թեև զարկերակ չկա, ուղղակի և հակադարձ մուտքերում լարումները մոտավորապես հավասար են, և համեմատիչը հավասարակշռված վիճակում է: Երբ փուլն անցնում է «0»-ով, DA1.1 համեմատիչի հակադարձ մուտքի մոտ, որը խաղում է «զրոյական դետեկտորի» դերը, հայտնվում են իմպուլսներ, որոնք փոխում են համեմատիչը, ինչի արդյունքում ժամացույցի ուղղանկյուն իմպուլսներ են առաջանում: DA1.1-ի ելքը, որի կրկնության ժամանակահատվածը խիստ կապված է փուլային կոնվերգենցիայի հետ «0»-ի միջոցով:
Ստորև ներկայացված են օքսիլոգրամները, որոնք բացատրում են գործողության սկզբունքը: 
Վերևից ներքև՝ CT1, CT2, CT3:
Շղթան մոդելավորվել է Multisim 11-ում: Ահա նախագծի ֆայլը: Դուք կարող եք ներբեռնել, գործարկել և տեսնել, թե ինչպես է աշխատում այս հանգույցը:
Այնուհետև ժամացույցի իմպուլսները տրանզիստորային բանալիով (C4, Q1) սնվում են ինտեգրատորի վրա, որտեղ առաջանում է սղոցի լարում: Այն պահին, երբ փուլն անցնում է «0»-ով, ժամացույցի զարկերակը բացում է տրանզիստորը Q1, որը լիցքաթափում է C4 կոնդենսատորը: Իմպուլսի քայքայվելուց հետո տրանզիստորը փակվում է, և կոնդենսատորը լիցքավորվում է մինչև հաջորդ համաժամացման իմպուլսը գա, ինչի արդյունքում կոլեկտորը կհայտնվի Q1 (տատանվող KT4): ձևավորվում է գծային աճող սղոցային լարում, որը կայունանում է կայուն հոսանքի գեներատորով, որը պատրաստված է դաշտային տրանզիստորի T1-ի վրա: «Սղոցի» ամպլիտուդը, որը հավասար է 9 Վ-ին, սահմանվում է RP1 հարմարվողական ռեզիստորով: «Սղոց» լարումը մատակարարվում է DA1.2 համեմատիչի ուղղակի մուտքին:
Հղման լարումը մատակարարվում է DA1.2 համեմատիչի հակադարձ մուտքին և այն պահին, երբ սղոցի լարը գերազանցում է լարման արժեքը համեմատիչի հակադարձ մուտքի մոտ, համեմատիչն անջատվում է, և համեմատիչի ելքում ձևավորվում է զարկերակ ( oscillator KT4): Զարկերակը տարբերվում է R14, C6 շղթայի միջոցով և սնվում Q2 տրանզիստորի հիմքին: Տրանզիստորը բացվում է և ուժային թրիստորների բացման իմպուլսներ են ձևավորվում Tr1 իմպուլսային տրանսֆորմատորի վրա: Աշխատանքի լարման ավելացում (նվազեցում)՝ KT5-ում իմպուլսների աշխատանքային ցիկլը փոխվում է։
Ահա ալիքի ձևերը. 
Բայց մենք ոչ մի իմպուլս չենք տեսնի KT5-ում, մինչև չսեղմենք «Սկսել» կոճակը՝ S1: Երբ կոճակը սեղմված չէ, սնուցման լարումը + 12 Վ սովորական փակ կոնտակտների միջոցով R12, D3 շղթայի երկայնքով սնվում է DA1.2 հակադարձ մուտքով և հավասար է մոտ 11 Վ-ի: Քանի որ այս լարումը գերազանցում է «սղոցի» լարումը, որը հավասար է 9 Վ-ի, համեմատիչը կողպված է, և թրիստորները բացելու համար հսկիչ իմպուլսները չեն ձևավորվում: Շարժիչի վթարը և ձախողումը կանխելու համար, եթե օպերատորը չի սահմանել արագության կարգավորիչը «0»-ի վրա, ապա միացումն ապահովում է արագացման միավոր C5, R13, որն օգտագործվում է շարժիչի սահուն արագացման համար: «Սկսել» ռեժիմում միացումն աշխատում է հետևյալ կերպ. «Սկսել» կոճակը սեղմելիս նորմալ է. փակ կոնտակտներբաց է, և շղթայի երկայնքով C5 կոնդենսատորը - «հող», R13, - C5 սկսում է սահուն լիցքավորվել և կոնդենսատորի բացասական ափսեի վրա լարումը աստիճանաբար ձգտում է զրոյի: Միևնույն ժամանակ, DA1.2 շրջվող մուտքի լարումը աստիճանաբար աճում է մինչև հղման լարման միջոցով որոշված արժեք, և համեմատիչը սկսում է արտադրել ուժային թրիստորների կառավարման իմպուլսներ: Լիցքավորման ժամանակը որոշվում է C5, R13 արժեքներով: Եթե շարժիչի շահագործման ընթացքում անհրաժեշտ է փոխել դրա արագությունը արագության հանկարծակի բարձրացումներից խուսափելու համար, ապա սխեման նախատեսում է «արագացում-դանդաղեցում» միավոր R21, C8, R22: Հղման լարման աճով (նվազմամբ) C8 կոնդենսատորը սահուն լիցքավորվում է (լիցքաթափվում), ինչը կանխում է լարման կտրուկ «աճը» ուժեղացուցիչի հակադարձ մուտքի մոտ և, որպես հետեւանք, կանխում է շարժիչի արագության կտրուկ աճը: .
Հիմա եկեք տեսնենք, թե ինչպես է այն աշխատում արագության կարգավորիչ.
Կարգավորիչը նախատեսված է կառավարման գոտում շարժիչի մշտական արագությունը պահպանելու համար: Կարգավորիչը դիֆերենցիալ ուժեղացուցիչ է երկու լարումների գումարմամբ՝ հղման լարման և հետադարձ լարման: Հղման լարումը սահմանվում է RP1 ռեզիստորի կողմից և սնվում է R20, C8, R21 ֆիլտրի միջոցով, որը միաժամանակ կատարում է «արագացում-դանդաղեցում» միավորի գործառույթները, սնվում է DA1.3 op-amp կարգավորիչի հակադարձ մուտքին: Op-amp DA1.3-ի ելքի վրա հղման լարման աճով ելքային լարումը գծայինորեն նվազում է:
Կարգավորիչի ելքային լարումը սնվում է SIFU DA1.2 համեմատիչի հակադարձ մուտքին, որտեղ, ամփոփված սղոցային լարման իմպուլսներով, այն վերածվում է մի շարք ուղղանկյուն իմպուլսների, որոնք գնում են դեպի թրիստորների կառավարման էլեկտրոդները: Հղման լարման աճով (նվազմամբ) ելքային լարումը էներգաբլոկի ելքի վրա նույնպես մեծանում է (նվազում):
Այս գրաֆիկը ցույց է տալիս շարժիչի արագության և հղման լարման միջև կապը: 
Շարժիչի RPM-ի արժեքները բերված են որպես օրինակ:
Լարման բաժանարար R22, R23, որը միացված է DA1.3 կարգավորիչի ուղղակի մուտքին, ծառայում է կանխելու շարժիչի վթարը, երբ հետադարձ կապը խզվում է (երբ հետադարձ կապը խզվում է, շարժիչը անցնում է գերլարման):
Երբ շարժիչը միացված է, տախոգեներատորը սկսում է առաջացնել շարժիչի արագությանը համաչափ լարում: Այս լարումը մատակարարվում է DA1.4, DA2.1 ճշգրիտ դետեկտորի մուտքին, որը հավաքվել է լրիվ ալիքի սխեմայի համաձայն: Ճշգրիտ DA1.4, DA2.1 դետեկտորի ելքից վերցված լարումը սնվում է C10, R30, R33 ֆիլտրի միջոցով դեպի հետադարձ մասշտաբային ուժեղացուցիչ DA2.2: Ուժեղացուցիչը ծառայում է տախոգեներատորից եկող հետադարձ լարման կարգավորմանը։ Լարումը op-amp DA2.2-ի ելքից: գնում է ինչպես DA1.3 կարգավորիչի մուտքի, այնպես էլ DA2.3 պաշտպանական շղթայի մեջ:
Resistor RP1-ը սահմանում է շարժիչի արագությունը: Երբ շարժիչը աշխատում է առանց ծանրաբեռնվածության, խտացման ուժեղացուցիչի ելքի լարումը ավելի ցածր է, քան op-amp DA1.3-ի 6-րդ կետի լարումը: ≈ +5v, ուստի սկավառակն աշխատում է որպես կարգավորիչ: Շարժիչի լիսեռի վրա բեռի ավելացմամբ տախոգեներատորից ստացված լարումը նվազում է, և արդյունքում նվազում է մասշտաբի ուժեղացուցիչի ելքից լարումը:
Երբ այս լարումը փոքր է, քան DU DA1.3-ի 5-րդ կետի լարումը, շարժիչը մտնում է ընթացիկ կայունացման գոտի: Op-amp DA1.3-ի ոչ շրջվող մուտքում լարման նվազեցումը հանգեցնում է դրա ելքի լարման նվազմանը, և քանի որ այն աշխատում է շրջող ուժեղացուցիչի DA1.2-ի վրա, դա հանգեցնում է թրիստորների բացման ավելի մեծ անկյունի: և, հետևաբար, շարժիչի խարիսխի լարման ավելացմանը:
ՊԱՇՏՊԱՆՈՒԹՅԱՆ ՍԽԵՄԱ
Արագության գերազանցման պաշտպանությունը նախատեսված է շարժիչը վթարից պաշտպանելու համար՝ սահմանված շարժիչի արագության կտրուկ աճի դեպքում: Շղթան հավաքվում է op-amp DA2.3-ի վրա՝ միացված ըստ համեմատական սխեմայի։ Հղման լարումը մատակարարվում է համեմատիչի հակադարձ մուտքին R36, R37, RP3 բաժանիչից: Resistor RP3-ը սահմանում է պաշտպանության շեմը: DA2.2 մասշտաբային ուժեղացուցիչի ելքից լարումը մատակարարվում է պաշտպանության համեմատիչի DA2.3 ուղղակի մուտքին: Երբ շարժիչի արագությունը գերազանցում է անվանականը, համեմատիչի ուղղակի մուտքի լարումը գերազանցում է RP3-ով որոշված պաշտպանության պարամետրի շեմը՝ համեմատիչի անջատիչները: Շղթայում դրական արձագանքի առկայության պատճառով R38-ը հանգեցնում է համեմատիչի «կռկռոցին», իսկ VD12 դիոդի առկայությունը թույլ չի տալիս համեմատիչին վերակայել: Երբ պաշտպանությունը գործարկվում է, VD14 դիոդի միջոցով պաշտպանության համեմատիչի ելքից լարումը (≈ +11v) սնվում է SIFU-ի հակադարձ մուտքային 13 DA1.2, և քանի որ պաշտպանության լարումը գերազանցում է «սղոցի» լարումը ( = 9v), հսկիչ թրիստորային էլեկտրոդներին հսկիչ իմպուլսներ տրամադրելու ակնթարթային արգելք կա: Պաշտպանական համեմատիչի DA2.3 ելքից լարումը բացում է VT4 տրանզիստորը, ինչը հանգեցնում է P1.1 ռելեի աշխատանքին և VL1 LED-ի բռնկմանը, որն ազդանշան է տալիս արտակարգ իրավիճակի մասին: Դուք կարող եք հեռացնել պաշտպանությունը միայն ամբողջությամբ անջատելով սկավառակը և 5-10 վայրկյան դադարից հետո նորից միացնելով այն:
Վերահսկիչ միավորի ուժային մասը:
Էլեկտրաէներգիայի հատվածի դիագրամը ներկայացված է ստորև: 
Տրանսֆորմատոր Tr1-ը նախատեսված է կառավարման միավորի սխեման սնուցելու համար: Վերահսկվող ուղղիչը հավաքվում է կիսակամուրջի սիմետրիկ սխեմայի համաձայն և պարունակում է երկու ուժային դիոդներ D1, D2
և երկու ուժային թրիստորներ T1, T2 և պաշտպանիչ դիոդ D3: Գրգռման ոլորուն սնուցվում է իր առանձին տրանսֆորմատորով և ուղղիչով:
Եթե շարժիչը չունի տախոգեներատոր, ապա արագությունը վերահսկելու համար հետադարձ կապը կարող է իրականացվել հետևյալ կերպ.
1. Օգտագործեք հոսանքի տրանսֆորմատոր, որը ներառված է վերահսկվող ուղղիչի էլեկտրամատակարարման միացումում 
Եթե օգտագործվում է ընթացիկ տրանսֆորմատոր, ապա տեղադրեք ցատկող P1 կառավարման միավորի շղթայի վրա
1-3 դիրքի համար դա անհրաժեշտ է, քանի որ բեռի մեծացմանը զուգընթաց կաճի խարիսխի հոսանքը, հետևաբար կմեծանա նաև ընթացիկ տրանսֆորմատորից հեռացված լարումը, ուստի հետադարձ լարումը պետք է կիրառվի հակադարձման վրա:
ելքային չիպ DA1.3. Կարող եք նաև տեղադրել ստանդարտ հոսանքի շունտ, բայց միայն շարժիչի խարիսխի միացումում, ուղղիչից հետո և հեռացնել հետադարձ ազդանշանը դրանից:
2. Օգտագործեք արմատուրայի լարման սենսոր: Դիագրամը ներկայացված է ստորև: 
Արմատուրայի լարման սենսորը զտիչ-բաժանիչ է և միացված է անմիջապես շարժիչի արմատուրային տերմինալներին: Սկավառակը կազմաձևված է հետևյալ կերպ. «Reference» և «Scaling Uoc» ռեզիստորները դրված են միջին դիրքի վրա: Արմատուրային լարման սենսորի R5 ռեզիստորը բերվում է ստորին դիրքի «գետնին»: Մենք միացնում ենք շարժիչը և լարումը դնում ենք շարժիչի արմատուրայի մոտ 110 վոլտ: Շարժիչի խարիսխի լարումը վերահսկելով, մենք սկսում ենք պտտել R5 դիմադրությունը: Կարգավորման որոշակի պահին արմատուրայի լարումը կսկսի նվազել, սա ցույց է տալիս, որ հետադարձ կապը սկսել է աշխատել:
Այժմ եկեք անցնենք կառավարման միավորի նախագծմանը և ճշգրտմանը:
Կառավարման ստորաբաժանումը պատրաստվել է տպագիր տպատախտակ(PCB ֆայլ) 

Տախտակը միացված է MGTF մետաղալարով միակցիչին՝ վերանորոգման ընթացքում հեշտ ապամոնտաժելու համար:
Կարգավորում
Թյունինգի ժամանակ հոսանքի հատվածը հավաքվում էր մակերեսային մոնտաժով, որպես բեռ օգտագործվում էր սովորական շիկացած լամպ: 
Մենք սկսում ենք կարգավորումը՝ ստուգելով սնուցման լարումները և մատակարարման լարումը DA1, DA2 գործառնական ուժեղացուցիչների վրա։ Ցանկալի է միկրոսխեմաներ դնել վարդակների մեջ։ Այնուհետև մենք վերահսկում ենք օքսիլոգրամները CT1, CT2, CT3 հսկիչ կետերում (այս կետերի տատանումները տրված են SIFU-ի նկարագրության սկզբում): Այժմ մենք օսցիլոսկոպը դնում ենք KT4 կառավարման կետում: Պետք է լինեն սղոցային իմպուլսներ, ինչպես վերը նշված օսցիլոգրամում (այս պահին «Սկսել» կոճակը պետք է բաց լինի): RP1 հարմարվողական ռեզիստորով դուք պետք է «սղոցի» ճոճանակը դնեք 9 վոլտ, սա շատ է կարևոր կետ, քանի որ սխեմայի հետագա աշխատանքը կախված է դրանից։ Քանի որ դաշտային տրանզիստորների պարամետրերի տարածումը կարող է շատ նշանակալից լինել, հնարավոր է, որ RP1-ի ճշգրտման միջակայքը կարող է բավարար չլինել, այնուհետև ընտրելով R10 ռեզիստորի արժեքը՝ հասնելու ցանկալի տիրույթին: KT3 կառավարման կետում իմպուլսի տեւողությունը պետք է լինի 1,5 - 1,8 մս, եթե ոչ, ապա ընտրելով R4 ռեզիստորը (նվազման ուղղությամբ)՝ հասնելու պահանջվող տեւողությանը:
Պտտելով RR1 կարգավորիչը KT5 կառավարման կետում, վերահսկեք իմպուլսների աշխատանքային ցիկլի փոփոխությունը առավելագույնից մինչև դրանց ամբողջական անհետացումը RR1 սահիկի ստորին դիրքում: Այս դեպքում էներգաբլոկին միացված լամպի պայծառությունը պետք է փոխվի:
Հաջորդը, մենք միացնում ենք կառավարման միավորը շարժիչին և տախոգեներատորին: Մենք սահմանել ենք RR1 կարգավորիչը
արմատուրայի լարումը մոտ 40-50 վոլտ է: Resistor RP3-ը պետք է դրվի միջին դիրքի: Շարժիչի խարիսխի լարումը վերահսկելով, մենք սկսում ենք պտտել RP3 դիմադրությունը: Կարգավորման որոշակի պահին արմատուրայի լարումը կսկսի նվազել, սա ցույց է տալիս, որ հետադարձ կապը սկսել է աշխատել: Նրանց համար, ովքեր ցանկանում են փորձարկել. սկավառակի կոշտությունը բարձրացնելու համար կարող եք նաև բարձրացնել դիմադրությունը R24, դրանով իսկ ավելացնելով կարգավորիչի շահույթը կամ մեծացնել R32 ռեզիստորը:
Եթե օգտագործվում է շարժիչի արմատուրայի ընթացիկ հետադարձ կապը:
Դրա համար, ինչպես նշվեց վերևում, հոսանքի միացումում ներառված է ընթացիկ տրանսֆորմատոր:
վերահսկվող ուղղիչ: Ընթացիկ տրանսֆորմատորի տրամաչափման սխեման տրված է ստորև: Ընտրելով ռեզիստոր՝ տրանսֆորմատորի ելքում ստացեք ≈ 2 ÷ 2.5v փոփոխական լարում: Բեռի հզորությունը RN1 պետք է համապատասխանի շարժիչի հզորությանը: 
Ուշադրություն. Մի միացրեք ընթացիկ տրանսֆորմատորը առանց բեռի դիմադրության:
Մենք ընթացիկ տրանսֆորմատորը միացնում ենք P1 և P2 հետադարձ կապի միացմանը: «Կարգավորիչը» տեղադրելու պահին ցանկալի է ապակոդավորել D12 դիոդը, որպեսզի բացառվի պաշտպանության կեղծ շահագործումը:
Օսկիլոգրամները KT8, KT9, KT10 կառավարման կետերում պետք է լինեն ստորև ներկայացված նկարում: 
Հետագա կարգավորումները նույնն են, ինչ տախոգեներատորի օգտագործման դեպքում:
Եթե օգտագործվում է շարժիչի արմատուրայի լարման հետադարձ կապը:
Ինչպես նշվեց վերևում, խարիսխի լարման հետադարձ կապը կարող է կիրառվել, դրա համար հավաքվում է խարիսխի լարման սենսոր: Վերահսկիչ միավորը կազմաձևված է հետևյալ կերպ. «Reference» և «Scaling Uoc» ռեզիստորները դրված են միջին դիրքի վրա: Արմատուրային լարման սենսորի R5 ռեզիստորը բերվում է ստորին դիրքի «գետնին»: Մենք միացնում ենք շարժիչը և լարումը դնում ենք շարժիչի արմատուրայի մոտ 110 վոլտ: Շարժիչի խարիսխի լարումը վերահսկելով, մենք սկսում ենք պտտել R5 դիմադրությունը: Կարգավորման որոշակի պահին արմատուրայի լարումը կսկսի նվազել, սա ցույց է տալիս, որ հետադարձ կապը սկսել է աշխատել:
Այս կառավարման միավորը պատրաստված է ձանձրալի մեքենայի համար: Ահա այս հրեշի լուսանկարը 

Այս մեքենայի վրա ձախողվեց էլեկտրական մեքենայի ուժեղացուցիչը, որը կառավարում էր DC շարժիչը սեղանը տեղափոխելու համար:
Ահա ուժային ուժեղացուցիչ: 
Փոխարենը պատրաստվեց այս բլոկըկառավարում։
Ահա ինքնին DC շարժիչի լուսանկարը: 
Վերահսկիչ միավորը հավաքվել է մեկուսիչ հիմքի վրա, որտեղ տեղադրված են բոլոր հիմնական տարրերը։ 
Էլեկտրաէներգիայի դիոդները և թրիստորները տեղադրվում են ջերմատախտակների վրա: Պատրաստվել է նաև միակցիչներով պանել, որտեղ ազդանշաններ են դուրս եկել շղթայի կառավարման կետերից։ Դա արվել է անմիջապես մեքենայի վրա տեղադրելու և վերանորոգելու հարմարության համար:
Ահա մեքենայի հոսանքի կաբինետում տեղադրված կառավարման միավորը 


Էլեկտրական պահարանի մյուս կողմում տեղադրվել է փոքր կառավարման վահանակ: 
Դրա վրա գտնվում են.
- անջատիչ անջատիչ սարքը միացնելու համար
- գործառնական ռեժիմի անջատիչ: Քանի որ մեքենայի սեղանի ճշգրտման շարժումների համար անհրաժեշտ չէ ճշգրիտ հսկողություն և հեղափոխությունների կայունացում, այս անգամ հետադարձ կապի սխեման անջատված է:
- պտույտների քանակը կարգավորելու կոճակներ: Մատակարարվել է երկու փոփոխական դիմադրություն, մեկը՝ կոպիտ կարգավորման համար, երկրորդը՝ բազմաշրջադարձային՝ մասի կոպիտ և նուրբ փորման համար պահանջվող պտույտների ճշգրիտ սահմանման համար:
Նրանց համար, ովքեր հետաքրքրված են, ստորև ներկայացված է մեքենայի շահագործման տեսանյութը: Նախ ցուցադրվում է 20 մմ հաստությամբ պողպատե ափսեի մեջ անցքի փորվածքը: Այնուհետև ցույց է տրվում, թե ինչ հաճախականությամբ է պտտվում մեքենայի սեղանի սնուցման պտուտակը: Այս արագությամբ հատվածը սնվում է կտրիչին, իսկ սնուցող պտուտակի այս արագությունը ապահովում է DC շարժիչը, որի համար, ըստ էության, արվել է այս ամենը։
Հսկիչ ստորաբաժանումը լավ է աշխատել, խափանումներ կամ վթարներ չեն եղել։
«Բաղադրիչներ և տեխնոլոգիաներ» ամսագրում երկու հոդվածների հրապարակումը քայլային շարժիչների, դրանց նախագծման առանձնահատկությունների և կառավարման սխեմաների, ինչպես նաև այդպիսի շարժիչներ ընտրելու համար մատչելի արդյունաբերական լուծումների վերաբերյալ, առաջացրեց քննարկում և ընթերցողների հետաքրքրությունը: Քննարկման ընթացքում հեղինակին ցանկություն հայտնվեց առաջարկել նույնքան ճկուն և պարզ գործնական լուծումներ փոքր և միջին հզորության DC կոմուտատորների շարժիչների կառավարման սխեմաների տեսքով, քանի որ տեխնիկական հրապարակումներում այս խնդրին անբավարար ուշադրություն է դարձվում: Ահա թե ինչի մասին է այս հոդվածը։ Նյութը քննարկում է գործնական լուծումներ և տալիս է առաջարկություններ ցածր և միջին հզորության DC կոլեկտորային շարժիչների կառավարման վերաբերյալ:
Ինչպես գիտեք, DC կոլեկտորային շարժիչները, երբ դիտարկվում են ընդհանուր գծերով, առավել մատչելի և տարածված են օգտագործման մեջ՝ գտնելով իրենց պատշաճ տեղը սարքերի լայն տեսականիում: Նրանց առավելությունները անկասկած են, սա է հսկողության սխեմաների գինը և պարզությունը: Եթե դժվար է չհամաձայնվել առաջին պնդման հետ, ապա երկրորդը հաճախ ապակողմնորոշիչ է, և ոչ միայն անփորձ օգտվող. Իրոք, նման շարժիչի արագությունը վերահսկելը կարծես թե առանձնահատուկ դժվարություններ չի առաջացնում. դա կարող է լինել կամ սովորական անալոգային լարման կարգավորիչներ կամ ավելի բարդ սխեմաներ, որոնք հիմնված են իմպուլսային լայնության (PWM) կարգավորիչների վրա: Խնդիրը, ավելի ճիշտ՝ խնդիրներն այլ տեղ են։ Փաստն այն է, որ անհրաժեշտ է դիտարկել DC կոլեկտորի շարժիչի վերահսկման հարցը կոնկրետ բեռով և հատուկ պայմաններում դրա իրական կիրառման համատեքստում, մասնավորապես, կառուցել կառավարման միացում՝ կախված լուծվող խնդրի տեսակից:
Եթե խնդիր կա կոլեկտորային շարժիչի արագությունը կարգավորելու առանց այն կայունացնելու, ապա այդ նպատակով և՛ անալոգային, և՛ իմպուլսային սխեմաներուղղակի վերահսկողություն առանց հետադարձ կապի: Անալոգային կարգավորիչները օգտագործվում են ցածր էներգիայի շարժիչները կառավարելու համար և սովորաբար հիմնված են լարման կայունացման սխեմաների վրա, երբեմն առավելագույն հոսանքը սահմանափակելու հնարավորությամբ շարժիչը և բեռը պաշտպանելու համար: Բայց ամենից հաճախ օգտագործվող կարգավորիչները PWM-ով: Ի տարբերություն PWM-ով անալոգային կառավարման սխեմաների, դրանք զգալիորեն ավելի բարձր արդյունավետություն ունեն: Նրանց գինը, ընդհանուր առմամբ, համարժեք է, քանի որ թանկարժեք ռադիատորներ չեն պահանջում: Այնուամենայնիվ, որոշ ծրագրերում դրանք պահանջում են սնուցման լարման կայունացում, քանի որ դրանց ելքային լարման հաստատուն բաղադրիչը կախված է ոչ միայն զարկերակային տևողության հարաբերակցությունից դեպի զարկերակային հաջորդականությունը τ/Τ ժամանակաշրջանին, այլև ամպլիտուդից: Անցնող իմպուլսային DC/DC փոխարկիչները կարող են օգտագործվել նաև, եթե դրանք ապահովում են լարման կարգավորման համապատասխան տիրույթ: Նման փոխարկիչների հաշվարկը առանձնապես բարդ չէ, դրա համար ձեզ հարկավոր կլինի բարձր մակարդակի ինտերակտիվ ծրագրային հաշվիչ, որը նկարագրված է ստորև: Բայց DC / DC փոխարկիչները հաշվարկելիս պետք է հաշվի առնել, որ դրանք պետք է ապահովեն հուսալի շահագործում ոչ միայն պահանջվող լարման միջակայքում, այլև հոսանքներում, ինչը միշտ չէ, որ հեշտ է օպտիմալացնել: Այդ իսկ պատճառով խորհուրդ է տրվում չօգտագործել չստուգված «պատրաստի» շղթայական լուծումներ, այլ դիմել հաշվարկներին և. ճիշտ ընտրությունՓոխարկիչ IC.
Եթե ոչ միայն կարգավորման, այլ արագության կայունացման խնդիր կա, այն լուծվում է օգնությամբ բարդ համակարգերհետադարձ կապով: Նման հետադարձ կապի տարրերից են տվիչները, որոնք տեղեկատվություն են տալիս պտտման արագության մասին։ Տեղեկատվությունը վերցվում է կամ շարժիչի ռոտորի լիսեռից կամ վերջնական շարժիչից: Արագության կայունացումն իրականացվում է կամ ռոտացիայի փուլային ավտոմատ հաճախականության հսկողության (PLL) օգտագործմամբ, կամ ավտոմատացման համար ավանդական հատուկ կարգավորիչներով: Սովորաբար օգտագործվում են համամասնական-ինտեգրալ-ածանցյալ (PID) կարգավորիչներ, քանի որ դրանք ավելի ունիվերսալ են կամ համամասնական-ինտեգրալ (PI), քանի որ դրանք ավելի պարզ են: Ամեն դեպքում, երկու լուծումներն էլ բավականին բարդ են ինչպես հաշվարկման, այնպես էլ կատարման համար, քանի որ դրանք կապված են ոչ միայն որոշակի տեսակի շարժիչի, այլև ամբողջ շարժիչ համակարգի հետ, որպես ամբողջություն: Ընդ որում, այս համակարգերում կարգավորման բնութագրերը որոշվում են փորձարարական եղանակով։ Նման կարգավորիչներին կարող եք ծանոթանալ երկրորդ հատորում։ Վերոհիշյալ բոլորը վերաբերում են կառավարման օղակի կառուցմանը: Բայց ամեն դեպքում, նման համակարգերում որպես վերջնական փուլեր տրամադրվում են կամ անալոգային կարգավորիչներ, կամ PWM կարգավորիչներ:
Բայց կան նաև այլ տեսակի խնդիրներ։ Օրինակ, մենք պետք է վերահսկենք ճշգրիտ փոփոխական բեռը, որը թույլ չի տալիս ցնցումներ և զգայուն է շարժիչը կանգնեցնելու և գործարկելու նկատմամբ: Այլ կերպ ասած, պահանջվում է ապահովել շարժիչի սահուն մեկնարկը, միատեսակ պտույտը նրա լիսեռի վրա անկանխատեսելի փոփոխվող բեռի տակ և դրա սահուն կանգառը շարժիչի լիսեռի ոլորող մոմենտների որոշակի աճով: Նման առաջադրանքի օրինակ է մագնիսական ձայնագրիչի ընդունիչ միավորի կառավարումը։ Հասկանալի է, որ այս հավելվածում շարժիչի պտտման ժամանակ ցնցումները լիովին անընդունելի են, և շարժիչի մեկնարկը և կանգառը պետք է լինեն «փափուկ»: Այս խնդիրը հատկապես սուր է, երբ օգտագործվում են ցածր իներցիա շարժիչներ, այսինքն, ռոտորի փոքր մեռած քաշով մանրանկարիչ շարժիչներ: Նման շարժիչին որոշակի ֆիքսված լարման պարզ մատակարարումը հանգեցնում է դրա ակնթարթային գործարկմանը և մագնիսական կրիչի ցնցմանը, իսկ դրա դադարեցման պահին (եթե կրիչի ծայրը կոշտ ամրագրված է), հարվածն արդեն տեղի է ունենում կուտակված զանգվածը և նման բեռի իներցիան շարժիչի լիսեռի վրա (իր սեփական զանգվածը ազդում է ընդունող հանգույցում կուտակված լրատվամիջոցների վրա): Այս խնդրի ամենահարմար լուծումներից մեկը, որն օգտագործվել է հեղինակի կողմից սերիական արտադրանքում, ներկայացված է Նկ. մեկ.
Բրինձ. 1. Կառավարման սխեման ցածր հզորության շարժիչների համար, որոնք աշխատում են ճշգրիտ բեռի վրա՝ փոփոխական ոլորող մոմենտով
Բնականաբար, դուք կարող եք ընտրել ստանդարտ կարգավորիչի IC-ներ, սակայն այս լուծումն ավելի ճկուն է և հեշտությամբ հարմարեցված կոնկրետ հավելվածին: Այն հատկապես հարմար է այն դեպքերում, երբ կարևոր է ոչ թե պտտման արագությունը, այլ անհրաժեշտ պահը, որ շարժիչը պետք է զարգանա։ Ավելին, այն հստակ սահմանված չէ կամ տատանվում է կախված հանգամանքներից, օրինակ արտաքին ազդեցություն, բեռի կամ մատակարարման լարման փոփոխություններ: Շղթան լարման կարգավորիչ է արտաքին կառավարումմեկնարկային և ընթացիկ սահմանափակող, այսինքն, այն ունի ելքային անկման բնութագիր՝ ելքային լարման կախվածությունը շարժիչի կողմից սպառվող հոսանքից: Կարգավորիչի ելքային լարումը շարժիչի անվանական ծանրաբեռնվածության դեպքում (սահմանված է R6, R8 բաժանարարով և նկար 1-ում ներկայացված տարբերակի համար) կարող է սահմանվել 10,8-ից մինչև 2,3 Վ միջակայքում: Ռոտորի միջին դիրքում թյունինգային ռեզիստորի R8, կարգավորիչի ելքային լարումը սնուցման լարումը 9-ից 15 Վ փոխելու ժամանակ (4,4 ± 0,1) V է: Ընթացքի սահմանային հսկողության հիմնական բնութագիրը սահմանվում է դիմադրության R3 արժեքով և սահմանվում է թյունինգային դիմադրություն R4 (հաշվի առնելով R5 դիմադրությունը): Առավելագույն ելքային հոսանքը կարելի է հաշվարկել ընդունելի ճշգրտությամբ՝ օգտագործելով բանաձևը.
![]()
որտեղ 6.6-ը կարգավորիչի VT1 տրանզիստորի թողարկիչում առավելագույն լարումն է բեռնվածքում կարճ միացման ռեժիմում:
Վերոնշյալ գծապատկերում, ի տարբերություն կարգավորիչի այլ սխեմաների, կարճ միացման ռեժիմում լարումը քիչ է կախված կարգավորիչի ելքային լարումից: Առաջարկվող շղթայում իրական առավելագույն ելքային հոսանքը մոտավորապես 3,3 Ա է, և նվազագույն հոսանքսահմանափակումը մոտավորապես 40 մԱ է: Ինչպես տեսնում եք, ընթացիկ ճշգրտման տիրույթը բավականին լայն է, ինչը վեր է շատ այլ կարգավորիչ սխեմաների հզորությունից, որոնք չունեն ներքին ուժեղացուցիչ՝ ընթացիկ սենսորը լրացնելու համար: Թյունինգային ռեզիստորի R4 ռոտորի միջին դիրքում սահմանափակող հոսանքը գտնվում է 340 մԱ մակարդակում ելքային լարման ողջ տիրույթում, երբ մատակարարման լարման կարգավորիչը փոխվում է 9-ից մինչև 15 Վ: Առավելագույն հոսանքը ձեռք է բերվում ձախ դիրքում: սահիկի (նկ. 1), նվազագույնը՝ աջում։ Ինչպես արդեն նշվեց, ելքային լարումը և, հետևաբար, շարժիչի պտտման արագությունը ռոտորի նվազագույն ծանրաբեռնվածության դեպքում սահմանվում է R8 ռեզիստորի կողմից («արագություն»), և կատարվում է հոսանքի պահանջվող սահմանային մակարդակի կարգավորում։ R4 հարմարվողական ռեզիստորի միջոցով («ընթացիկ սահման»):
Հաշվի առնելով վերը նշված սխեմայի առանձնահատկությունները, դրա կարգավորումը հետևյալն է. հսկիչ սխեմայի ելքը կարճ միացված է ամպաչափով, իսկ պահանջվող սահմանափակող հոսանքը սահմանվում է թյունինգային ռեզիստորով R4; ապա շարժիչը միացված է ռոտորի նվազագույն բեռնվածությամբ և համապատասխան ելքային լարումը սահմանվում է R8 դիմադրությամբ, որն ապահովում է շարժիչի նշված արագությունը: Բարձր ճշգրտությամբ շղթան (նկարագրված ռեժիմում ոչ ավելի, քան 2%) պահում է ելքային լարումը տվյալ մակարդակում մինչև բեռի 65% հասնելը (ռեզիստորի R4-ի կողմից սահմանված առավելագույն ելքային հոսանքը): Ավելին, շարժիչի վրա լարումը սկսում է աստիճանաբար նվազել, դրանով իսկ սահմանափակելով դրա ձևավորվող ոլորող մոմենտը: Ընթացքի և լարման փոփոխությունների գրաֆիկը կախված շարժիչի ծանրաբեռնվածությունից (աշխատանքային լարումը 5 Վ, ոլորուն դիմադրությունը 2 Օմ) ներկայացված է նկ. 2.

Բրինձ. Նկար 2. Կարգավորիչի ելքային հոսանքի (I դուրս) և ելքային լարման (V դուրս) գրաֆիկը (նկ. 1)՝ կախված 200 մԱ սահմանափակող հոսանքի բեռից։
Շարժիչի միացման/անջատման կառավարումն իրականացվում է CTRL հրամանով` տրամաբանական միավոր ցանկացած թվային միկրոսխեմաից կամ այս ելքին առնվազն +1,5 Վ լարման մակարդակ կիրառելով: Երբ միացումը միացված է (հոսանքի սահմանափակման պատճառով և. հետևաբար, ոլորող մոմենտ), արտաքին բեռի վերահսկման մեջ ցնցում տեղի չի ունենում: Արագացումից հետո շարժիչը անցնում է անշարժ ռեժիմի, որի ընթացիկ սպառումը ցածր է շղթայի կողմից սահմանված սահմանից: Երբ շարժիչի ծանրաբեռնվածությունը մեծանում է սահմանված մակարդակից, կարգավորիչի ելքային հոսանքը մնում է սահմանափակող շղթայի կողմից սահմանված մակարդակում, իսկ շարժիչի վրա լարումը աստիճանաբար նվազում է (նկ. 2) և երբ նրա ռոտորը կարճանում է լրիվ կանգառի պատճառով։ , այն հավասար է լարման անկմանը ռոտորի ոլորման ակտիվ դիմադրության վրա տվյալ առավելագույն ելքային հոսանքի դեպքում։ Շարժիչի հզորության փոփոխությունը ցույց տվող գրաֆիկը (պայմանները նման են նկ. 2-ում ներկայացված գրաֆիկին), կախված ծանրաբեռնվածությունից, ներկայացված է նկ. 3.

Բրինձ. 3. Շարժիչի կողմից մշակված հզորության կախվածության գրաֆիկը բեռնվածքից, 200 մԱ հոսանքի սահմանաչափով.
Ինչպես երևում է գրաֆիկից (նկ. 3), հզորությունը, եթե շարժիչի ծանրաբեռնվածությունը գերազանցում է 70%-ը, սկսում է սահմանափակվել և աստիճանաբար նվազում է։ Երբ շարժիչը ստիպված է լինում կանգ առնել, այն կկազմի առավելագույնի 12%-ը՝ դրանով իսկ պաշտպանելով շարժիչը գերբեռնվածությունից և բացառելով դրա հանկարծակի արգելակումը: Առաջարկվում է ընտրել կարգավորիչի սահմանափակող հոսանքը 20-25% ավելի բարձր, քան անվանական գործառնական հոսանքը շարժիչի աշխատանքի նշված ռեժիմում շարժիչի նվազագույն թույլատրելի աշխատանքային լարման դեպքում: Նկարագրված սկզբունքով սարքեր նախագծելիս անհրաժեշտ է հաշվի առնել VT1 կարգավորիչ տրանզիստորի կողմից ցրված հզորությունը (կարող է պահանջվել ռադիատոր), իսկ որոշ դեպքերում R3 դիմադրիչի կողմից ցրված հզորությունը: Ի լրումն վերը նկարագրված սխեմայի առանձնահատկություններին, այս լուծումը երկարացնում է շարժիչի ծառայության ժամկետը և պարզեցնում ընդունիչի ընդհանուր դիզայնը, քանի որ այն այլևս չի պահանջում մեծ քանակությամբ գլանափաթեթներ, որոնք փոխհատուցում են մագնիսական կրիչի անհավասար ընդունումը: Եվ ի տարբերություն PWM օգտագործող ընտրանքների, այս լուծումը գործնականում ոչ մի լրացուցիչ ազդեցություն չունի սարքի էլեկտրամագնիսական և ռադիո միջամտության ընդհանուր մակարդակի վրա, որպես ամբողջություն:
Կարող է առաջանալ ողջամիտ հարց. ինչու՞ է նման բարդություն, երբ կարող եք օգտագործել ինտեգրված ընթացիկ սահմանափակող կայունացուցիչի վրա հիմնված միացում: Որպես օրինակ, դիտարկեք «նման» տարբերակը, որը հիմնված է IC-ի վրա կարգավորելի կայունացուցիչլարումը իր ելքային հոսանքը LM317T սահմանափակելու հնարավորությամբ: Նման սխեման ներկայացված է Նկ. չորս.

Բրինձ. 4. Անալոգային կարգավորիչի պարզեցված տարբերակը՝ հիմնված LM317T IC-ի վրա
Նման սխեմայի հաշվարկը չափազանց պարզ է. Քննարկվող դեպքի համար ելքային լարումը պարապուրդի ժամանակ որոշվում է բանաձևով.
![]()
որտեղ V նշվ- ներքին հղման աղբյուրի լարումը, ըստ բնութագրի բնորոշ արժեքի V նշվ= 1,25 Վ.
Սահմանափակող հոսանքը սահմանվում է ռեզիստորի միջոցով Ռլիմև հավասար է.
![]()
Պայմանները կթողնենք անփոփոխ՝ ելքային լարումը 5 Վ, սահմանափակող հոսանքը 200 մԱ։ Տարրերի անվանական արժեքների հաշվարկների արդյունքները ներկայացված են գծապատկերում. չորս.
Այժմ, կասկածները փարատելու և նման լուծումների օգտագործման վերաբերյալ հարցերը վերացնելու համար, Նկ. Նկար 5-ը և 6-ը ցույց են տալիս շղթայի կախվածության գրաֆիկները նկ. 4 սխեմայի համանման պայմաններում նկ. մեկ.

Բրինձ. Նկար 5. Կարգավորիչի ելքային հոսանքի (I դուրս) և ելքային լարման (V դուրս) գրաֆիկը (նկ. 4)՝ կախված 200 մԱ սահմանափակող հոսանքի բեռից։

Բրինձ. Նկ. 6. Շարժիչից հզորության և լարման կախվածության գրաֆիկները բեռից 200 մԱ սահմանափակող հոսանքի դեպքում շղթայի տարբերակի համար նկ. չորս
Նկատելի տարբերություն? Շարժիչի հզորությունը կիսով չափ նվազել է, և միացումն այլևս լարման կարգավորիչ չէ: Ընթացիկ սահմանափակող ռեզիստորը կունենա 6 ohms անվանական արժեք, և դուք կարող եք մոռանալ հոսանքի գործառնական ճշգրտման մասին: Միևնույն ժամանակ, հիշեք, որ բաց շղթայի լարումը պետք է սահմանվի ոչ թե 5 Վ, այլ 6,4 Վ-ի: Այս իրավիճակից կարող եք դուրս գալ՝ երկու փուլ հաջորդաբար միացնելով LM317T IC-ի վրա: Առաջինը միացված է 200 մԱ հոսանքի կարգավորիչի ռեժիմում, երկրորդը՝ 5 Վ լարման կարգավորիչի ռեժիմում: Բայց նույնիսկ այս դեպքում դուք չեք ստանա ճկունություն ճշգրտման և կառավարման մեջ (մասնավորապես, ցածր հոսանքի միացում/անջատում: կառավարում), որը առաջարկվող շղթան տալիս է նկ. մեկ.
Դիտարկենք ևս մեկ օրինակ՝ կառավարում առանց PWM-ի համեմատաբար հզոր կոլեկտորային շարժիչի, որը վերահսկում է զանգվածային իներցիոն բեռը, որը պահանջում է համեմատաբար ճշգրիտ դիրքավորում, երբ այն կանգ է առնում և, որ ամենակարևորն է, հակադարձում: Ենթադրենք, դա ինչ-որ զանգվածային պտտվող սեղան է շարժիչով: Որո՞նք են կառավարման այս տարբերակի առանձնահատկությունները: Ինչպես տեսնում եք, այստեղ, շարժիչն ինքնին գերծանրաբեռնվածությունից պաշտպանելուց բացի, անհրաժեշտ է ապահովել դրա հետընթացը և բավականին ճշգրիտ կանգառը դրա կողմից վարվող զանգվածային հարթակի տվյալ դիրքում: Շարժիչի ոլորունների միջոցով հոսանքի վերլուծության վրա հիմնված սովորական կարգավորիչներն այստեղ արդյունավետ չեն, քանի որ շարժիչի վրա բեռը արդեն բարձր է, համապատասխանաբար, գրեթե անհնար է «բռնել» աճը: հոսանքի մեջ կանգառի պահին։ Այլ կերպ ասած, անհնար է հաշվարկել, որ դա բեռի կամ շարժիչի կանգառի ազդեցությունն է իր ռոտորի կանգառի պատճառով ոլորուն հոսանքի փոփոխության պատճառով: Նման խնդրի լուծումը պահանջվել է հոդվածի հեղինակի կողմից, երբ մշակում էր DC կոմուտատորի շարժիչի կառավարման միացում՝ 50 կգ զանգվածով ռոբոտային սարքավորումների ակտուատորով պլատֆորմը պտտելու համար: Շարժիչն ինքնին բեռնաթափելու համար օգտագործվել է փոխանցման տուփ 810: 1 փոխանցման հարաբերակցությամբ: Հասկանալի է, որ եթե հատուկ միջոցներ չձեռնարկվեն, հարթակը ոչ միայն չի սկսի շարժվել և չի կանգնի տվյալ դիրքում, այլ երբ շարժիչը գործարկվի կամ մեխանիկական խցանով ստիպվի կանգ առնել, նրա փոխանցման տուփը կկործանվի։ Նույնը կարող է պատահել հնարավոր վթարային կանգառի դեպքում: Կիրառվող շարժիչի Como Drills 91908101 4,5-15 V 21,2 Վտ (RS- կատալոգի համարը 321-3170) համեմատաբար բարձր հզորության պատճառով հսկիչի օգտագործումը նման է նկ. 1 և լայնորեն օգտագործվող PWM կառավարման տարբերակները ակնհայտորեն անիրագործելի են և անհնարին: Ինչպես նշվեց վերևում, այն պահանջում է, որ շարժիչը շրջվի և բավականին ճշգրիտ կանգնեցվի իներցիոն բեռի պայմաններում: Այս առաջադրանքի համար հարմար և, ամենակարևորը, ճկուն լուծումը ներկայացված է Նկ. 7. Դիմում է հոդվածի հեղինակը այս սարքըգործնականում և՛ որպես թեստային մոդուլ, և՛ փոքր-ինչ փոփոխված ձևով, որպես սերիական արտադրանքի մաս:

Բրինձ. 7. Իներցիալ բեռի վրա աշխատող միջին հզորության կոմուտատորների շարժիչների կառավարման սխեման
Շղթայի հիմքը LMD18245T վարորդական չիպն է (նախկինում՝ National Semiconductor Corp., այժմ՝ Texas Instruments Inc.), որը սովորաբար օգտագործվում է ոչ ստանդարտ, ոչ փաստաթղթավորված տեխնիկական բնութագրերում, առանց իմպուլսային հսկողության ընդգրկված քայլային շարժիչների համար: Հաշվի առնելով այս IC-ի թույլատրելի օգտագործումը կառավարման իմպուլսների մատակարարման ընդհատման երկարաժամկետ ռեժիմում, դրա ընդգրկման առաջարկվող տարբերակը չի կարող արգելված համարվել: Այս IC-ի առանձնահատկությունները մանրամասն նկարագրված են. Հակիրճ հիշեք. վարորդի առավելագույն հոսանքը սահմանվում է ռեզիստորի միջոցով, որը ներառված է LMD18245T IC-ի 13-րդ կապի շղթայում (ռեզիստոր R4, Նկար 4), և երկուական կոդելքային հոսանքի կառավարման շղթայի կոնտակտների վրա (տերմինալներ 8, 7, 6, 4): Վարորդի առավելագույն ելքային հոսանքի հաշվարկման բանաձևը տրված է սպեցիֆիկացիայի մեջ, իսկ քննարկվող դեպքի համար այն հավասար կլինի.
որտեղ V DAC նշվ- DAC-ի հղման լարումը (դիտարկվող շղթայում V DAC նշվ= 5 Վ); D - DAC-ի ներգրավված բիթերը (քննարկվող շղթայում օգտագործվում են բոլոր 16 բիթերը, «log. 1»-ը կիրառվում է բոլոր չորս ծրագրավորման մուտքերի M1, M2, M3, M4); Ռ Ս- ընթացիկ սահմանափակող դիմադրության արժեքը (R4 = 15 կՕմ):
Համապատասխանաբար (քանի որ DAC-ի բոլոր 16 բիթերը ներգրավված են), վարորդի ընթացիկ սահմանափակումը ընթացիկ սահմանափակող ռեզիստոր օգտագործելիս Ռ Ս 15 կՕմ (R4) անվանական արժեքով կլինի 1,33 Ա: Ռեժիմը ընտրելու և կարգավորելու համար կարող եք նաև օգտագործել աղյուսակը, որը հասանելի է ճշգրտման վերջին թողարկումում:
LMD18245T IC-ի առավելությունն այն է, որ ընթացիկ սահմանափակող ռեզիստորը R4 ուղղակիորեն միացված չէ շարժիչի հոսանքի միացմանը, ունի բավականին մեծ սեփական արժեք (այս դեպքում դա 15 կՕմ է), ինչը նշանակում է էներգիայի ցածր սպառում և (ամենակարևորը. !) Չի ազդում շղթայի արդյունավետության վրա բոլոր կառավարման ընթացքում: Ընթացիկ սահմանափակումը կատարվում է այնպես, որ շատ ծրագրերի համար ջերմատախտակի կարիք չկա: Երբ միացված է, ընտրված կամրջի թևերի ստեղները լիովին բաց են, և երբ հասնում է առավելագույն հոսանքը (սահմանված է «M» մուտքերով և ռեզիստորի R4 արժեքով), դրա «կտրումը» (այսպես կոչված, կտրում, անգլերենից։ կտրատում) Այս «կտրատումը» ինչ-որ PWM չէ և իրականացվում է օգտագործողի կողմից սահմանված իմպուլսներով։ Նրանք չունեն զառիթափ ճակատներ, «կտրատման» իմպուլսների տեւողությունը սահմանվում է վարորդի 3-րդ պինդին միացված զուգահեռ RC շղթայով (R5, C6 տարրեր) և հավասար է 1,1 R5C6 վայրկյանում։ Սա թույլ է տալիս որոշ չափով պարզեցնել էլեկտրամագնիսական համատեղելիության խնդիրների լուծումը։ Այս IC-ի մեկ այլ մեծ առավելությունն այն է, որ դրա ելքային փուլը սնուցվում է կառավարման սխեմաներից առանձին. այս կերպ Դուք կարող եք հեշտությամբ սահմանել պահանջվող լարումը որոշակի տեսակի շարժիչի համար:
Շարժիչը միացված է START կոճակով (B1): Արտաքին գեներատորներ չեն պահանջվում: Ելքային փուլը LMD18245T պատրաստված է կամրջի սխեմայի համաձայն և պարունակում է բոլոր անհրաժեշտ պաշտպանիչ տարրերը՝ ելքային անջատիչներին զուգահեռ տեղադրված բարձր արագությամբ դիոդներ։ Այսպիսով, հնարավոր է հեշտությամբ շրջել շարժիչը առանց հզոր ռելեների, լրացուցիչ կառավարման սխեմաների և պաշտպանիչ տարրերի օգնության: Հակառակը կատարվում է «ուղղության» անջատիչի (S1) վրա տրամաբանական միավորի կիրառմամբ: Բացի այդ, այս IC-ն հեշտացնում է շարժիչի հարկադիր արգելակման ռեժիմի իրականացումը կանգառի պահին: Դա արվում է շարժիչի ռոտորի ոլորուն փակելով: Արգելակման դադարեցումը START հրամանի հեռացումից հետո իրականացվում է 10-րդ պտուտակի վրա տրամաբանական միավորի կիրառմամբ (մուտքային BRAKE), իսկ շարժիչի ոլորուն կարճացվում է վարորդի ներքին անջատիչների միջոցով: Այս միացումում իրականացվում է շարժիչի կանգառի հսկողության կրկնակի ռեժիմ. նախ՝ սա զրոյի հոսանքի սահմանն է՝ առավելագույն ընթացիկ մակարդակը ծրագրավորելու համար մուտքերի վրա տրամաբանական զրոներ կիրառելով (կեռիկներ 8, 7, 6, 4); երկրորդը, կիրառելով տրամաբանական միավորը արգելակման մուտքային արգելակում (փին 10): Այս մոտեցումը ապահովում է մեխանիզմի հուսալի կանգառը որպես ամբողջություն տվյալ դիրքում առանց խցանների օգտագործման: Հարկ է նշել, որ ին ընդհանուր դեպք DAC բիթերին զրոների հարկադիր մատակարարումը խիստ անհրաժեշտ չէ, այս ամենը ապահովված է ներքին կառուցվածքը LMD18245T IC-ի տրամաբանությունը և D1 IC-ը (նկ. 7) կարող է ավելորդ համարվել, եթե այն չպահանջվեր վերացնել շարժիչի գործարկման կոճակի շփման ցատկումը:
DC շարժիչի արագությունը վերահսկելու ամենապարզ մեթոդը օգտագործելն է զարկերակային լայնության մոդուլյացիա(PWM կամ PWM): Այս մեթոդի էությունն այն է, որ սնուցման լարումը կիրառվում է շարժիչի վրա իմպուլսների տեսքով: Այս դեպքում զարկերակային կրկնության արագությունը մնում է հաստատուն, մինչդեռ դրանց տևողությունը կարող է տարբեր լինել:
PWM ազդանշանը բնութագրվում է այնպիսի պարամետրով, ինչպիսին է աշխատանքային ցիկլը կամ Duty ցիկլը: Այս արժեքը աշխատանքային ցիկլի փոխադարձն է և հավասար է իմպուլսի տևողության հարաբերակցությանը դրա ժամանակաշրջանին:
D = (t/T) * 100%
Ստորև բերված նկարները ցույց են տալիս PWM ազդանշանները տարբեր աշխատանքային ցիկլերով:
Այս կառավարման մեթոդով շարժիչի արագությունը համաչափ կլինի PWM ազդանշանի աշխատանքային ցիկլին:
Պարզ DC շարժիչի կառավարման միացում
DC շարժիչի կառավարման ամենապարզ սխեման բաղկացած է դաշտային ազդեցության տրանզիստոր, որի դարպասի վրա կիրառվում է PWM ազդանշան։ Այս շղթայում տրանզիստորը դեր է խաղում էլեկտրոնային բանալի, շարժիչի ելքերից մեկը միացնելով գետնին: Տրանզիստորը միանում է իմպուլսի տևողության պահին:

Ինչպե՞ս կվարվի շարժիչը նման ընդգրկման մեջ: Եթե PWM ազդանշանի հաճախականությունը ցածր է (միավոր Հց), ապա շարժիչը կտրուկ կշրջվի: Սա հատկապես նկատելի կլինի PWM ազդանշանի փոքր աշխատանքային ցիկլով:
Հարյուրավոր Հց հաճախականությամբ շարժիչը կպտտվի անընդհատ, և նրա պտտման արագությունը կփոխվի աշխատանքային ցիկլի համեմատ: Կոպիտ ասած՝ շարժիչը «կընկալի» իրեն մատակարարվող էներգիայի միջին արժեքը։
PWM ազդանշան ստեղծելու միացում
Կան բազմաթիվ սխեմաներ PWM ազդանշան ստեղծելու համար: Ամենապարզներից մեկը 555-րդ ժմչփի վրա հիմնված միացում է: Այն պահանջում է նվազագույն բաղադրիչներ, կարիք չունի կազմաձևման և հավաքվում է մեկ ժամում:
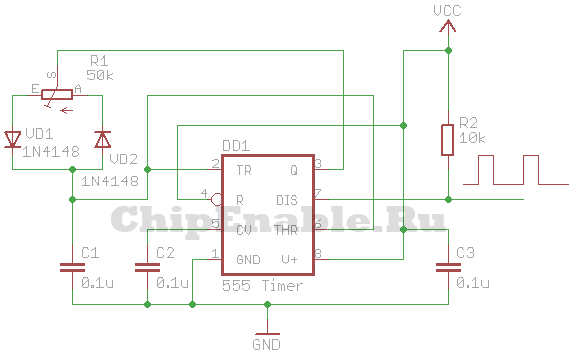
VCC շղթայի մատակարարման լարումը կարող է լինել 5 - 16 վոլտ միջակայքում: Որպես VD1 - VD3 դիոդներ, դուք կարող եք վերցնել գրեթե ցանկացած դիոդ:
Եթե դուք հետաքրքրված եք հասկանալու, թե ինչպես է աշխատում այս սխեման, դուք պետք է դիմեք 555-րդ ժմչփի բլոկային դիագրամին: Ժմչփը բաղկացած է լարման բաժանարարից, երկու համեմատիչից, ֆլիպ-ֆլոպից, բաց կոլեկտորի անջատիչից և ելքային բուֆերից։

Էներգամատակարարման (VCC) և վերակայման (Reset) ելքերը միացված են դրական սնուցմանը, օրինակ՝ +5 Վ, իսկ հողը (GND) բացասականին: Տրանզիստորի բաց կոլեկտորը (ելքային DISCH) ռեզիստորի միջոցով քաշվում է դեպի հզորություն գումարած և դրանից հանվում է PWM ազդանշանը: CONT փին չի օգտագործվում, դրան միացված է կոնդենսատոր: THRES և TRIG համեմատիչների ելքերը համակցված են և միացված են RC շղթային, որը բաղկացած է. փոփոխական դիմադրություն, երկու դիոդ և կոնդենսատոր։ Փոփոխական ռեզիստորի միջին քորոցը միացված է OUT փինին: Ռեզիստորի ծայրահեղ տերմինալները դիոդների միջոցով միացված են կոնդենսատորին, որը գետնին միացված է երկրորդ տերմինալով։ Դիոդների այս ընդգրկման շնորհիվ կոնդենսատորը լիցքավորվում է փոփոխական ռեզիստորի մի մասի միջոցով, իսկ մյուսի միջոցով լիցքաթափվում է:
Էլեկտրաէներգիայի միացման պահին OUT փին ունի ցածր տրամաբանական մակարդակ, այնուհետև THRES և TRIG կապերը, շնորհիվ VD2 դիոդի, նույնպես կլինեն. ցածր մակարդակ. Վերին համեմատիչը ելքը կփոխի զրոյի, իսկ ստորինը՝ մեկին: Գործարկիչի ելքը կդրվի զրոյի (քանի որ ելքում ունի ինվերտոր), տրանզիստորի անջատիչը կփակվի, և OUT փին կկարգավորվի բարձր մակարդակ(քանի որ նա մուտքի մոտ ունի ինվերտոր): Հաջորդը, C3 կոնդենսատորը կսկսի լիցքավորվել VD1 դիոդի միջոցով: Երբ այն լիցքավորվում է որոշակի մակարդակի, ստորին համեմատիչը կանցնի զրոյի, իսկ այնուհետև վերին համեմատիչը կփոխարինի ելքը մեկին: Ձկան ելքը կսահմանվի մեկ, տրանզիստորի անջատիչը կմիանա, իսկ OUT քորոցը կիջնի: C3 կոնդենսատորը կսկսի լիցքաթափվել VD2 դիոդի միջով, մինչև այն ամբողջությամբ լիցքաթափվի, և համեմատողները միացնեն ձգանը այլ վիճակի: Այնուհետև ցիկլը կկրկնվի:
Այս սխեմայի կողմից առաջացած PWM ազդանշանի մոտավոր հաճախականությունը կարելի է հաշվարկել հետևյալ բանաձևով.
F = 1,44/(R1*C1), [Հց]
որտեղ R1-ը ohms-ով է, C1-ը՝ ֆարադներով:
Վերոնշյալ դիագրամում նշված վարկանիշների դեպքում PWM ազդանշանի հաճախականությունը հավասար կլինի.
F = 1.44 / (50000 * 0.0000001) = 288 Հց:
PWM DC շարժիչի արագության կարգավորիչ
Եկեք համատեղենք վերը նշված երկու գծապատկերները և կստանանք պարզ միացում DC շարժիչի արագության կարգավորիչ, որը կարող է օգտագործվել խաղալիքի, ռոբոտի, միկրոփորի և այլնի շարժիչի արագությունը վերահսկելու համար:
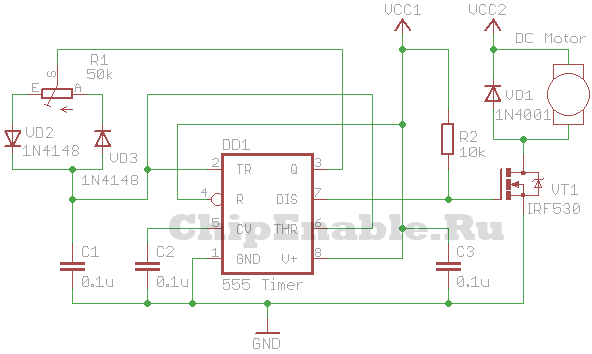
VT1-ը n-տիպի դաշտային ազդեցության տրանզիստոր է, որն ունակ է դիմակայել շարժիչի առավելագույն հոսանքին տվյալ լարման և լիսեռի բեռի դեպքում: VCC1-ը 5-ից 16 Վ է, VCC2-ը մեծ է կամ հավասար է VCC1-ին:
Դաշտային ազդեցության տրանզիստորի փոխարեն կարող եք օգտագործել երկբևեռ n-p-nտրանզիստոր, Darlington տրանզիստոր, համապատասխան հզորության օպտո-ռելե։







